פיתוח רחפן – תכנון רחפן שלב 4
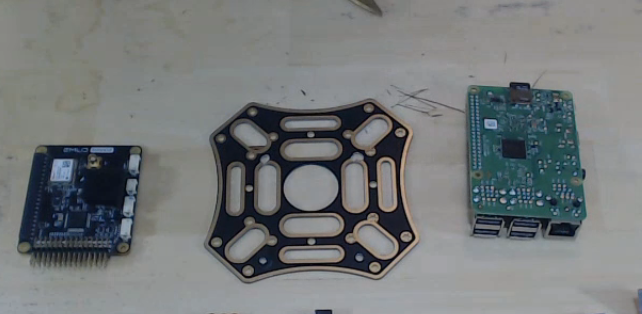
NAVIO or PIXHAWK drones
נחבר את הכל

יש לעטוף כל כבל עם הפינים עם מבודד – אחרת יהיה קצר
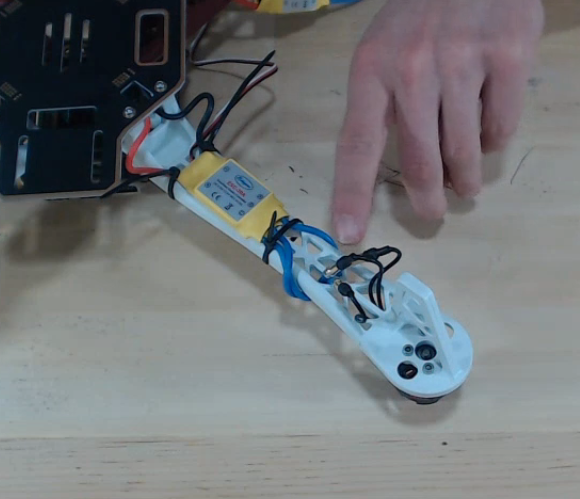
אפשרות חשובה של צורך חיבור הי עלידי Frame with Vibration Dampeners יכולים לגרום שגיאות לאקסלורמטר וזה יגרום לשגיאות


Pixhawk to Raspberry Pi

נחבר ל AT

נחבר לערוץ 3
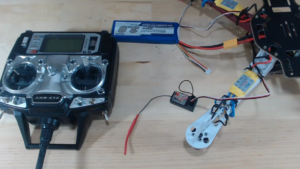
נבצע PAIR בין המקלט לשלט- אם המקלט מהבהב – אז הוא לא מקושר לשלט – אלר הקישור שנעשה אמור להיות רק צבע קבוע ולא מהבהב

זה הכפתור BIND לעשות PAIR
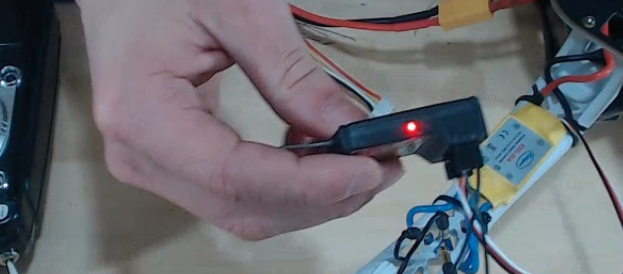
כל שלט יש שיטה שלו לבצע את ה PAIR