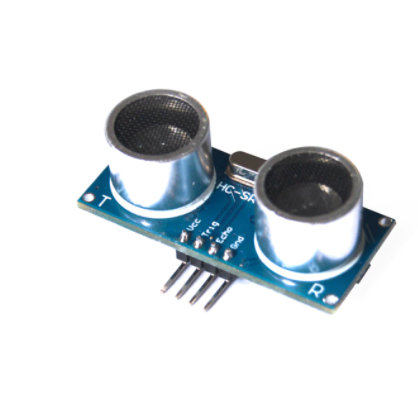
ארדואינו – מד מרחק אולטראסוניק – איך לחבר ? ואיך הוא עבוד בכלל ?
החיישן יוצר פולטס בתדר מאוד גבוה אשר נקרא פולס , כאשר הקול פוגע באובייקט למשל "קיר" חוזר הקול חזרה לחיישן
הזמן שלוקח לקול לחזור לחלק ל 2 זה מחושב לפי משוואת מיהרות כפול זמן שווה דרך כלומר דרך = מרחק .
מאחר שהחיישן "שומע " מתי גל הקול חוזר , את הזמן נחלק בשתים – כי הוא גם הלך וגם חזר .
צריך לזכור שהמיקרו מעבד עובד במיהרות של מליוני פעולות השניה והוא מסוגל לחשב את הזמן בחלקקי מיליונית השניה .
אם הזמן שלקוח לקול לעבור הינו 343.3 M/S ולכן
מיהרות הקול ב טמפרטורה 20 מעלות צלצזיות באויר הינה שהיא 343 מטר לשניה .
1 מטר יש 100 ס"מ כלומר בשניה 1 גל הקול עובר 34,300 ס"מ לשניה
באללפית השניה (מילי שניה ) גל הקול יעבור 34.3 ס"מ מילישניה
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
// www.robotronix.co.il // Distance sensor // learn arduino לימוד ארדואינו קורס C506 const int pingPin = 7; // Trigger Pin of Ultrasonic Sensor const int echoPin = 6; // Echo Pin of Ultrasonic Sensor void setup() { Serial.begin(9600); // Starting Serial Terminal } void loop() { long duration, inches, cm; pinMode(pingPin, OUTPUT); digitalWrite(pingPin, LOW); delayMicroseconds(2); digitalWrite(pingPin, HIGH); delayMicroseconds(10); digitalWrite(pingPin, LOW); pinMode(echoPin, INPUT); duration = pulseIn(echoPin, HIGH); inches = microsecondsToInches(duration); cm = microsecondsToCentimeters(duration); // Serial.print(inches); // Serial.print("in, "); Serial.print(cm); Serial.print("cm"); Serial.println(); delay(250); } long microsecondsToInches(long microseconds) { return (microseconds / 74 / 2); } long microsecondsToCentimeters(long microseconds) { return (microseconds / 29 / 2); } |