רובוטרוניקס מפתחת מעגלים ותוכנה מבוססי EPS32
ESP32 כיתבה סיריאלית
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 |
int led_pin = 13; void setup() { Serial.begin(9600); pinMode(led_pin, OUTPUT); // set the digital pin as output: } void loop() { if(Serial.available()) // if there is data comming { String command = Serial.readStringUntil('\n'); // read string until meet newline character if(command == "ON") { digitalWrite(led_pin, HIGH); // turn on LED Serial.println("LED is turned ON"); // send action to Serial Monitor } else if(command == "OFF") { digitalWrite(led_pin, LOW); // turn off LED Serial.println("LED is turned OFF"); // send action to Serial Monitor } } } |
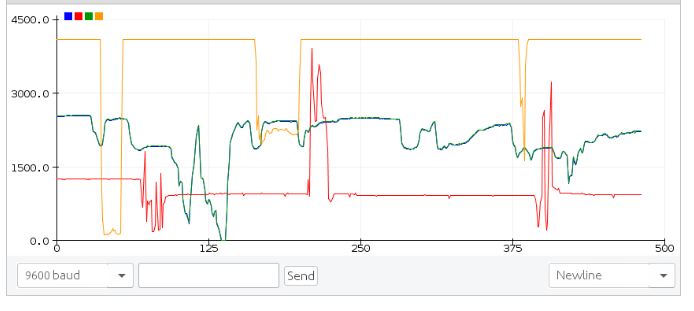
קריאה ערכים אנאלוגים :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 |
void setup() { Serial.begin(9600); } void loop() { int y1 = analogRead(2); int y2 = analogRead(4); int y3 = analogRead(5); int y4 = analogRead(18); Serial.print(y1); Serial.print(" "); // a space ' ' or tab '\t' character is printed between the two values. Serial.print(y2); Serial.print('\t'); // a space ' ' or tab '\t' character is printed between the two values. Serial.print(y3); Serial.print(" "); // a space ' ' or tab '\t' character is printed between the two values. Serial.println(y4); // the last value is followed by a carriage return and a newline characters. delay(100); } |
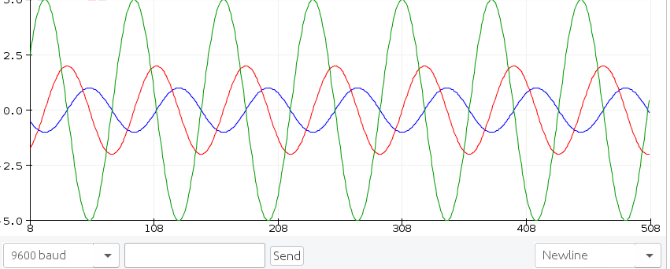
פלט אות
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 |
void setup() { Serial.begin(9600); } void loop() { for(int i = 0; i < 360; i += 5) { float y1 = 1 * sin(i * M_PI / 180); float y2 = 2 * sin((i + 90)* M_PI / 180); float y3 = 5 * sin((i + 180)* M_PI / 180); Serial.print(y1); Serial.print("\t"); // a space ' ' or tab '\t' character is printed between the two values. Serial.print(y2); Serial.print("\t"); // a space ' ' or tab '\t' character is printed between the two values. Serial.println(y3); // the last value is followed by a carriage return and a newline characters. delay(100); } } |
יצירת קול וסאונד עם EPS32
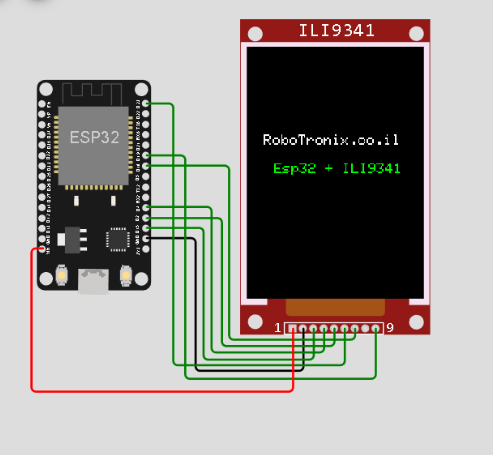
כתיבה למסך ESP32 :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
/* ESP32 + ILI9341 LCD Basic Example https://wokwi.com/projects/343642378725229138 */ #include "SPI.h" #include "Adafruit_GFX.h" #include "Adafruit_ILI9341.h" #define TFT_DC 2 #define TFT_CS 15 Adafruit_ILI9341 tft = Adafruit_ILI9341(TFT_CS, TFT_DC); void setup() { tft.begin(); tft.setCursor(20, 120); tft.setTextColor(ILI9341_WHITE); tft.setTextSize(2); tft.println("RoboTronix.co.il"); tft.setCursor(34, 160); tft.setTextColor(ILI9341_GREEN); tft.setTextSize(2); tft.println("Esp32 + ILI9341"); } void loop() { delay(10); } |
https://wokwi.com/projects/343642378725229138
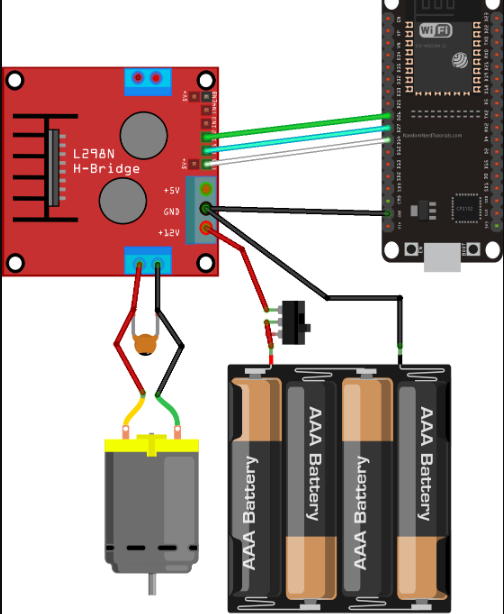
הפעלת מנוע
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 |
// Motor A int motor1Pin1 = 27; int motor1Pin2 = 26; int enable1Pin = 14; // Setting PWM properties const int m_freq = 30000; const int m_pwmChannel = 3; const int m_resolution = 8; int m_dutyCycle = 200; // Red, green, and blue pins for PWM control const int redPin = 13; // 13 corresponds to GPIO13 const int greenPin = 12; // 12 corresponds to GPIO12 const int bluePin = 14; // 14 corresponds to GPIO14 // Setting PWM frequency, channels and bit resolution const int freq = 5000; const int redChannel = 0; const int greenChannel = 1; const int blueChannel = 2; // Bit resolution 2^8 = 256 const int resolution = 8; void setup() { // sets the pins as outputs: pinMode(motor1Pin1, OUTPUT); pinMode(motor1Pin2, OUTPUT); pinMode(enable1Pin, OUTPUT); // configure LED PWM functionalitites ledcSetup(m_pwmChannel, m_freq, m_resolution); // attach the channel to the GPIO to be controlled ledcAttachPin(enable1Pin, m_pwmChannel); // configure LED PWM functionalitites ledcSetup(redChannel, freq, resolution); ledcSetup(greenChannel, freq, resolution); ledcSetup(blueChannel, freq, resolution); // attach the channel to the GPIO to be controlled ledcAttachPin(redPin, redChannel); ledcAttachPin(greenPin, greenChannel); ledcAttachPin(bluePin, blueChannel); } void loop() { // Move the DC motor forward at maximum speed Serial.println("Moving Forward"); digitalWrite(motor1Pin1, LOW); digitalWrite(motor1Pin2, HIGH); ledcWrite(redChannel, 0); ledcWrite(greenChannel, 0); ledcWrite(blueChannel, 250); delay(2000); // Stop the DC motor Serial.println("Motor stopped"); digitalWrite(motor1Pin1, LOW); digitalWrite(motor1Pin2, LOW); ledcWrite(redChannel, 0); ledcWrite(greenChannel, 250); ledcWrite(blueChannel, 0); delay(1000); // Move DC motor backwards at maximum speed Serial.println("Moving Backwards"); digitalWrite(motor1Pin1, HIGH); digitalWrite(motor1Pin2, LOW); ledcWrite(redChannel, 250); ledcWrite(greenChannel, 0); ledcWrite(blueChannel, 0); delay(2000); // Stop the DC motor Serial.println("Motor stopped"); digitalWrite(motor1Pin1, LOW); digitalWrite(motor1Pin2, LOW); ledcWrite(redChannel, 0); ledcWrite(greenChannel, 250); ledcWrite(blueChannel, 0); delay(1000); } |
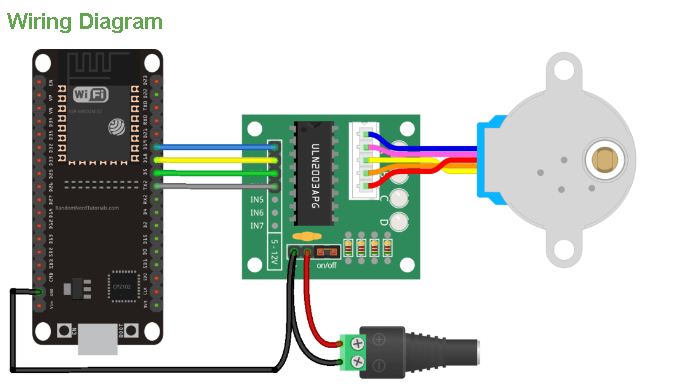
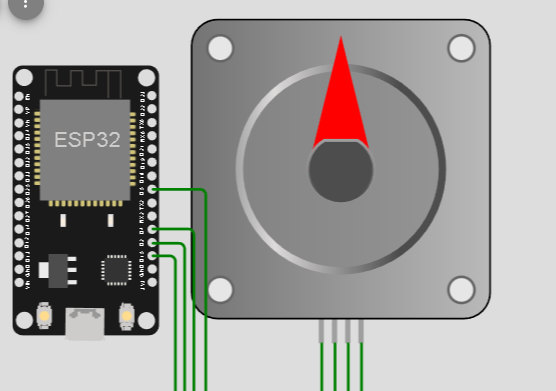
מנוע צעד ESP32 :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
#include <Stepper.h> const int stepsPerRevolution = 2048; // change this to fit the number of steps per revolution // ULN2003 Motor Driver Pins #define IN1 19 #define IN2 18 #define IN3 5 #define IN4 17 // initialize the stepper library Stepper myStepper(stepsPerRevolution, IN1, IN3, IN2, IN4); void setup() { // set the speed at 5 rpm myStepper.setSpeed(5); // initialize the serial port Serial.begin(115200); } void loop() { // step one revolution in one direction: Serial.println("clockwise"); myStepper.step(stepsPerRevolution); delay(1000); // step one revolution in the other direction: Serial.println("counterclockwise"); myStepper.step(-stepsPerRevolution); delay(1000); } |
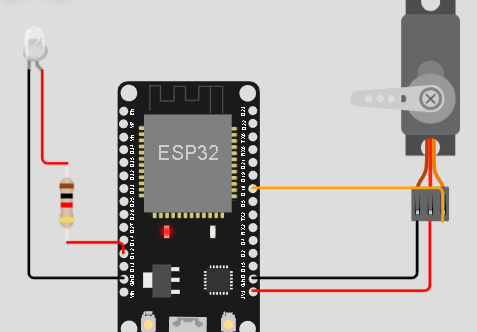
esp32 הפעלת סרבו
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
#include <WiFi.h> #include <ESP32Servo.h> Servo myservo; //create servo object to control servo int pos = 0; //variable to store server position static const int servoPin = 18; const int LED = 12; String command; void setup(){ Serial.begin(115200); //allow allocation of all timers ESP32PWM::allocateTimer(0); ESP32PWM::allocateTimer(1); ESP32PWM::allocateTimer(2); ESP32PWM::allocateTimer(3); myservo.setPeriodHertz(50); //standard 50hz servo myservo.attach(servoPin, 10, 2800); // attaches the servo on pin 18 to the servo object pinMode(LED, OUTPUT); Serial.println("Door is "); for (pos = 0; pos<=180; pos+=1){ myservo.write(pos); digitalWrite(LED,HIGH); delay(15); } for (pos = 180; pos>=0; pos-=1){ myservo.write(pos); digitalWrite(LED,LOW); delay(15); } } void loop(){ } //Serial.print(pos); |
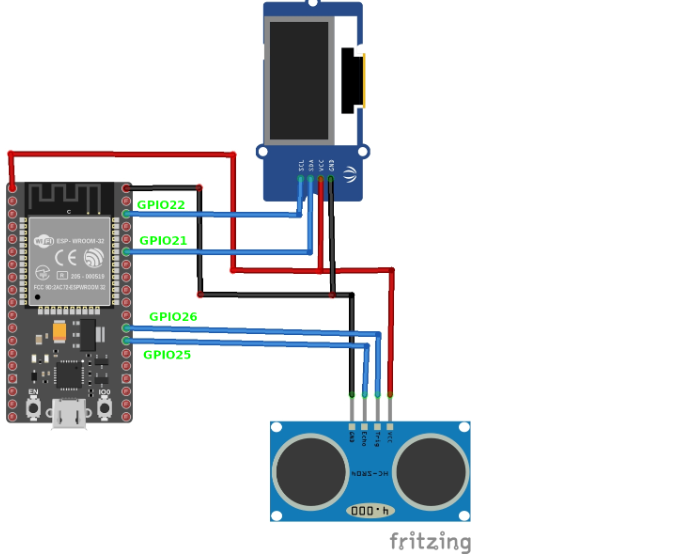
חיישן מרחק וכתיבה למסך OLED ESP32
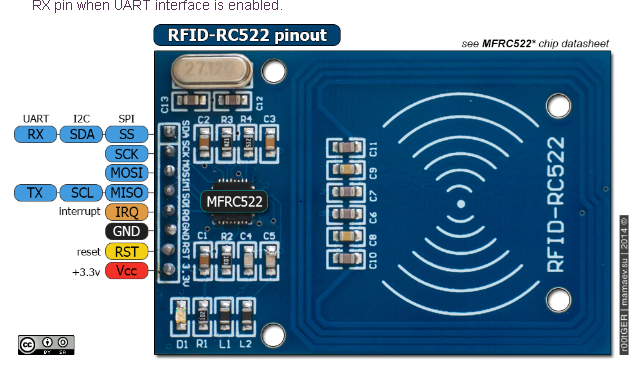
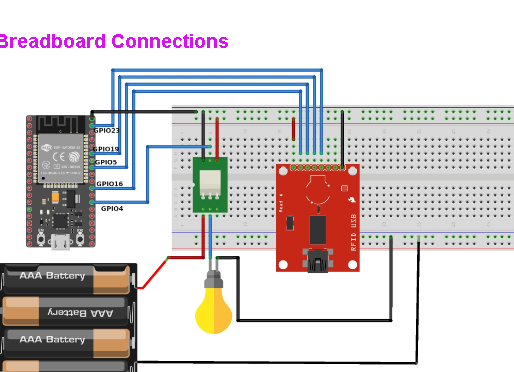
RFID ESP32
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 |
#include <SPI.h> #include <MFRC522.h> #define SS_PIN 5 #define RST_PIN 16 MFRC522 mfrc522(SS_PIN, RST_PIN); // Create MFRC522 instance. #define relayPin 4 void setup() { Serial.begin(9600); // Initiate a serial communication SPI.begin(); // Initiate SPI bus mfrc522.PCD_Init(); // Initiate MFRC522 Serial.println("Approximate your card to the reader..."); Serial.println(); pinMode(relayPin,OUTPUT); } void loop() { // Look for new cards if ( ! mfrc522.PICC_IsNewCardPresent()) { return; } // Select one of the cards if ( ! mfrc522.PICC_ReadCardSerial()) { return; } //Show UID on serial monitor Serial.print("UID tag :"); String content= ""; byte letter; for (byte i = 0; i < mfrc522.uid.size; i++) { Serial.print(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "); Serial.print(mfrc522.uid.uidByte[i], HEX); content.concat(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " ")); content.concat(String(mfrc522.uid.uidByte[i], HEX)); } Serial.println(); Serial.print("Message : "); content.toUpperCase(); if (content.substring(1) == "D2 E4 DA 1B") //change here the UID of the card/cards that you want to give access { Serial.println("Authorized access"); Serial.println(); digitalWrite(relayPin,HIGH); delay(2000); digitalWrite(relayPin,LOW); } else { Serial.println(" Access denied"); delay(1000); } } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 |
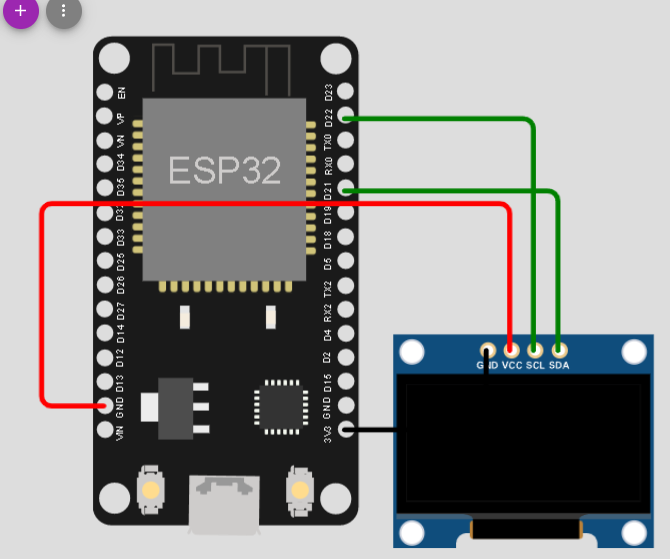
#include <Wire.h> #include <Adafruit_GFX.h> #include <Adafruit_SSD1306.h> #define SCREEN_WIDTH 128 // OLED display width, in pixels #define SCREEN_HEIGHT 64 // OLED display height, in pixels #define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin) #define SCREEN_ADDRESS 0x3C /// See datasheet for Address; 0x3D for 128x64, 0x3C for 128x32 Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); #define TRIG_PIN 26 // ESP32 pin GIOP26 connected to Ultrasonic Sensor's TRIG pin #define ECHO_PIN 25 // ESP32 pin GIOP25 connected to Ultrasonic Sensor's ECHO pin float duration_us, distance_cm; void setup() { Serial.begin(9600); // SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally if(!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) { Serial.println(F("SSD1306 allocation failed")); for(;;); // Don't proceed, loop forever } // Show initial display buffer contents on the screen -- // the library initializes this with an Adafruit splash screen. display.display(); delay(2000); // Pause for 2 seconds display.clearDisplay(); // clear display display.setTextSize(2); // set text size display.setTextColor(WHITE, BLACK); // set text color pinMode(TRIG_PIN, OUTPUT); // config trigger pin to output mode pinMode(ECHO_PIN, INPUT); // config echo pin to input mode } void loop() { // generate 10-microsecond pulse to TRIG pin digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW); // measure duration of pulse from ECHO pin duration_us = pulseIn(ECHO_PIN, HIGH); // calculate the distance distance_cm = 0.017 * duration_us; display.setTextSize(2); display.setCursor(10, 1); // set position to display display.println("Distance: "); // set text display.setTextSize(3); display.setCursor(10, 30); display.println(distance_cm); display.display(); // display on OLED delay(500); } |
esp32 step motor
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 |
//Full Step One Revolution 200 steps 1.8 Degree void setup() { // Stepper Motor Sqeuence pins +A , -A , +B , -B connections pinMode(4, OUTPUT); //+A (2a) pin No. to motor pinMode(5, OUTPUT); //-A (2b) Pin No. pinMode(2, OUTPUT); //+B (1a) Pin no. pinMode(15, OUTPUT);//-B (1b) Pin No. // initialize the serial port: Serial.begin(9600); } void loop() { unsigned int Speed= 100; for(int j=0;j<=50;j++) { digitalWrite(15,HIGH); digitalWrite(2,LOW); digitalWrite(4,HIGH); digitalWrite(5,LOW); delay(Speed); digitalWrite(15,LOW); digitalWrite(2,HIGH); digitalWrite(4,HIGH); digitalWrite(5,LOW); delay(Speed); digitalWrite(15,LOW); digitalWrite(2,HIGH); digitalWrite(4,LOW); digitalWrite(5,HIGH); delay(Speed); digitalWrite(15,HIGH); digitalWrite(2,LOW); digitalWrite(4,LOW); digitalWrite(5,HIGH); delay(Speed); } for(int j=0;j<=10;j++) { } } |
|
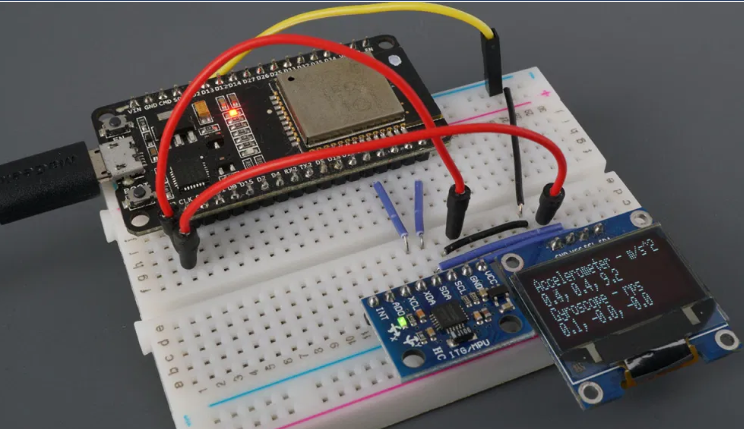
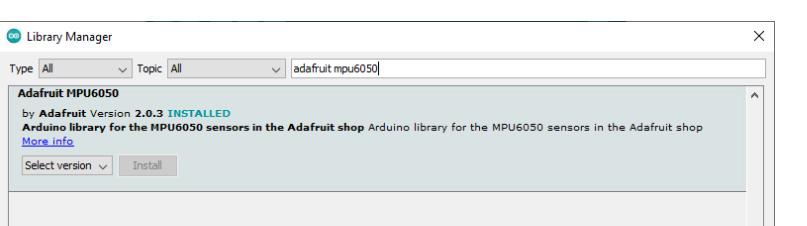
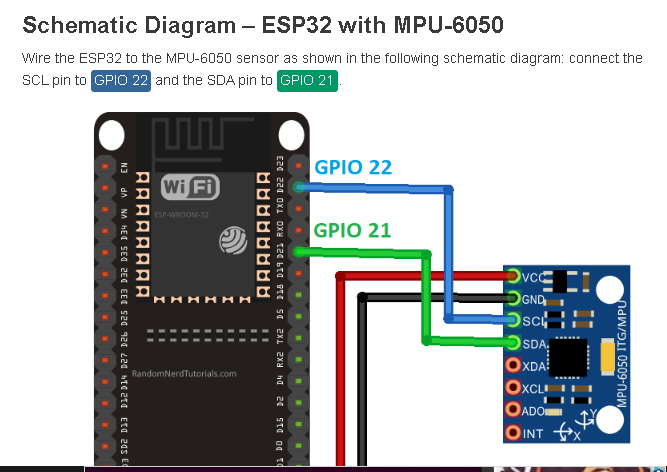
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 |
// ESP8266 Guide: https://RandomNerdTutorials.com/esp8266-nodemcu-mpu-6050-accelerometer-gyroscope-arduino/ // Arduino Guide: https://RandomNerdTutorials.com/arduino-mpu-6050-accelerometer-gyroscope/ #include <Adafruit_MPU6050.h> #include <Adafruit_Sensor.h> #include <Wire.h> Adafruit_MPU6050 mpu; void setup(void) { Serial.begin(115200); while (!Serial) delay(10); // will pause Zero, Leonardo, etc until serial console opens Serial.println("Adafruit MPU6050 test!"); // Try to initialize! if (!mpu.begin()) { Serial.println("Failed to find MPU6050 chip"); while (1) { delay(10); } } Serial.println("MPU6050 Found!"); mpu.setAccelerometerRange(MPU6050_RANGE_8_G); Serial.print("Accelerometer range set to: "); switch (mpu.getAccelerometerRange()) { case MPU6050_RANGE_2_G: Serial.println("+-2G"); break; case MPU6050_RANGE_4_G: Serial.println("+-4G"); break; case MPU6050_RANGE_8_G: Serial.println("+-8G"); break; case MPU6050_RANGE_16_G: Serial.println("+-16G"); break; } mpu.setGyroRange(MPU6050_RANGE_500_DEG); Serial.print("Gyro range set to: "); switch (mpu.getGyroRange()) { case MPU6050_RANGE_250_DEG: Serial.println("+- 250 deg/s"); break; case MPU6050_RANGE_500_DEG: Serial.println("+- 500 deg/s"); break; case MPU6050_RANGE_1000_DEG: Serial.println("+- 1000 deg/s"); break; case MPU6050_RANGE_2000_DEG: Serial.println("+- 2000 deg/s"); break; } mpu.setFilterBandwidth(MPU6050_BAND_5_HZ); Serial.print("Filter bandwidth set to: "); switch (mpu.getFilterBandwidth()) { case MPU6050_BAND_260_HZ: Serial.println("260 Hz"); break; case MPU6050_BAND_184_HZ: Serial.println("184 Hz"); break; case MPU6050_BAND_94_HZ: Serial.println("94 Hz"); break; case MPU6050_BAND_44_HZ: Serial.println("44 Hz"); break; case MPU6050_BAND_21_HZ: Serial.println("21 Hz"); break; case MPU6050_BAND_10_HZ: Serial.println("10 Hz"); break; case MPU6050_BAND_5_HZ: Serial.println("5 Hz"); break; } Serial.println(""); delay(100); } void loop() { /* Get new sensor events with the readings */ sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp); /* Print out the values */ Serial.print("Acceleration X: "); Serial.print(a.acceleration.x); Serial.print(", Y: "); Serial.print(a.acceleration.y); Serial.print(", Z: "); Serial.print(a.acceleration.z); Serial.println(" m/s^2"); Serial.print("Rotation X: "); Serial.print(g.gyro.x); Serial.print(", Y: "); Serial.print(g.gyro.y); Serial.print(", Z: "); Serial.print(g.gyro.z); Serial.println(" rad/s"); Serial.print("Temperature: "); Serial.print(temp.temperature); Serial.println(" degC"); Serial.println(""); delay(500); } |
https://wokwi.com/projects/346132016597566034
שימוש ב OLED esp32
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 |
// oled example : Robotronix.co.il #include <Wire.h> #include <Adafruit_SSD1306.h> // Memanggil Library OLED SSD1306 #define SCREEN_WIDTH 128 // Lebar Oled dalam Pixel #define SCREEN_HEIGHT 32 // Tinggi Oled dalam Pixel #define OLED_RESET 4 Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); int dataInt; //Mendeklarasi varibel dataInt void setup() { if(!display.begin(SSD1306_SWITCHCAPVCC, 0x3C)) { // alamat I2C 0x3C untuk 128x32 Serial.println(F("SSD1306 Gagal")); for(;;); // mengulang terus, hingga bisa menghubungkan ke I2C Oled } display.display(); delay(2000); display.clearDisplay(); //Membersihkan tampilan display.setTextSize(1); //Ukuran tulisan display.setTextColor(SSD1306_WHITE); //Warna Tulisan display.setCursor(0,0); // Koordinat awal tulisan (x,y) dimulai dari atas-kiri display.println(F("Robotronix.co.il")); //Menampilkan Tulisan RobotikIndonesia display.setCursor(0,9); // Koordinat awal tulisan (x,y) dimulai dari atas-kiri display.println(dataInt); //Menampilkan nilai variabel dataInt display.display(); //Mulai Menampilkan delay(2000); } void loop(){ } |
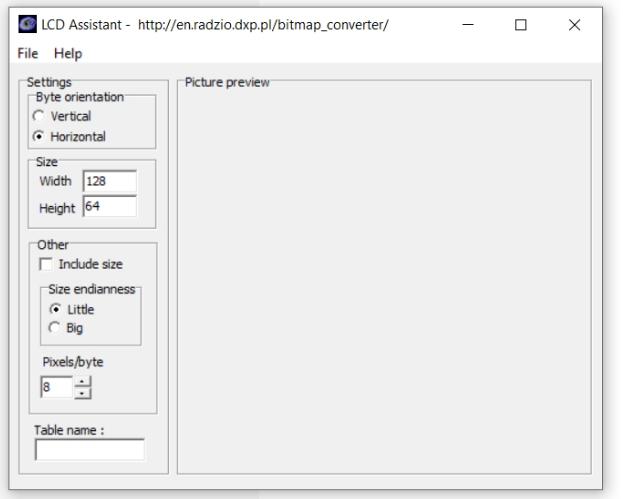
טעינה של IMAGE לתוך מסך
הורדת תוכנה LCD ASSISTANT
https://en.freedownloadmanager.org/Windows-PC/LCD-Assistant-FREE.html
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 |
#define SCREEN_WIDTH 128 // OLED display width, in pixels #define SCREEN_HEIGHT 64 // OLED display height, in pixels #define OLED_RESET -1 // Reset pin # (or -1 if sharing Arduino reset pin) #define SCREEN_ADDRESS 0x3C ///< See datasheet for Address; 0x3D for 128x64, 0x3C for 128x32 Adafruit_SSD1306 display(SCREEN_WIDTH, SCREEN_HEIGHT, &Wire, OLED_RESET); const unsigned char smileEmoji [] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0f, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xc0, 0x01, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x18, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0xc0, 0x00, 0xc0, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x01, 0xe0, 0x01, 0xe0, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x01, 0xe0, 0x01, 0xe0, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x01, 0xf0, 0x03, 0xe0, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x03, 0xf0, 0x03, 0xf0, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x03, 0xf0, 0x03, 0xe0, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x01, 0xe0, 0x01, 0xe0, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xe0, 0x01, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x1c, 0x00, 0x00, 0x00, 0x00, 0x3c, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x3e, 0x00, 0x00, 0x00, 0x00, 0x3f, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x3c, 0x00, 0x00, 0x00, 0x00, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x18, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x0e, 0x00, 0x00, 0x00, 0x00, 0x18, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x06, 0x00, 0x00, 0x00, 0x00, 0x38, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x06, 0x00, 0x00, 0x00, 0x00, 0x30, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x03, 0x00, 0x00, 0x00, 0x00, 0x30, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x03, 0x80, 0x00, 0x00, 0x00, 0x60, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x01, 0x80, 0x00, 0x00, 0x00, 0xe0, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x01, 0xc0, 0x00, 0x00, 0x01, 0xc0, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0xe0, 0x00, 0x00, 0x03, 0x80, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x70, 0x00, 0x00, 0x07, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x38, 0x00, 0x00, 0x0e, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x1e, 0x00, 0x00, 0x3c, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x60, 0x07, 0x80, 0x00, 0xf8, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x01, 0xf0, 0x07, 0xe0, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x7f, 0xff, 0x80, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x0f, 0xfc, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x18, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0f, 0x00, 0x00, 0x78, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xe0, 0x03, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1f, 0xfc, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 }; const unsigned char sadEmoji [] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7c, 0x3e, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x80, 0x01, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x18, 0x00, 0x00, 0x18, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xc0, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x18, 0x1f, 0x00, 0x00, 0xf8, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x30, 0x80, 0x01, 0x04, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x1f, 0x00, 0x00, 0xf8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x80, 0x01, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x80, 0x01, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x40, 0x02, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x80, 0x01, 0x04, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x20, 0x80, 0x01, 0x04, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x1f, 0x00, 0x00, 0xf8, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x0f, 0xf0, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x0c, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x40, 0x02, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x80, 0x01, 0x80, 0x04, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x01, 0x00, 0x00, 0x80, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x10, 0x02, 0x00, 0x00, 0x40, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x10, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0c, 0x00, 0x00, 0x30, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0xc0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xf8, 0x0f, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xf0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 }; const unsigned char ahmad [] = { 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0x81, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x01, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x01, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x01, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7C, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3C, 0x00, 0x00, 0x00, 0x00, 0xFF, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3C, 0x00, 0x00, 0x00, 0x03, 0xFF, 0xC0, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3E, 0x00, 0x00, 0x00, 0x07, 0xFF, 0xE0, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3E, 0x00, 0x00, 0x00, 0x0F, 0xFF, 0xF8, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1E, 0x00, 0x03, 0xE0, 0x0F, 0xC1, 0xFC, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1E, 0x00, 0x07, 0xF8, 0x0F, 0x00, 0xFF, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x0F, 0xFC, 0x07, 0x00, 0x3F, 0xE0, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x0F, 0xFE, 0x00, 0x00, 0x1F, 0xFF, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x80, 0x1F, 0x3F, 0x00, 0x00, 0x07, 0xFF, 0xC0, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0xFF, 0xFE, 0x1F, 0xC0, 0x00, 0x0F, 0xFF, 0xC0, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x03, 0x03, 0xFF, 0xFF, 0xFE, 0x1F, 0xE0, 0x00, 0x3F, 0xFF, 0xC0, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x07, 0xFF, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF, 0x00, 0xFF, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x0F, 0xFF, 0xFF, 0xFF, 0xFF, 0x1F, 0xFF, 0xFF, 0xFE, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x07, 0xFF, 0xF8, 0x00, 0x0F, 0x9E, 0xFF, 0xFF, 0xFC, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x01, 0xFF, 0x00, 0x00, 0x0F, 0xFE, 0x3F, 0xFF, 0xF0, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFE, 0x01, 0xFF, 0xC0, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00 }; void setup() { Serial.begin(9600); // SSD1306_SWITCHCAPVCC = generate display voltage from 3.3V internally if(!display.begin(SSD1306_SWITCHCAPVCC, SCREEN_ADDRESS)) { Serial.println(F("SSD1306 allocation failed")); for(;;); // Don't proceed, loop forever } // Show initial display buffer contents on the screen -- // the library initializes this with an Adafruit splash screen. display.display(); delay(2000); // Pause for 2 seconds } void loop() { // Clear the buffer display.clearDisplay(); display.drawBitmap(0, 0, smileEmoji, 128, 64, WHITE); display.display(); delay(3000); // Clear the buffer display.clearDisplay(); display.drawBitmap(0, 0, sadEmoji, 128, 64, WHITE); display.display(); delay(3000); // Clear the buffer display.clearDisplay(); display.drawBitmap(0, 0, ahmad, 128, 64, WHITE); display.display(); delay(3000); } |
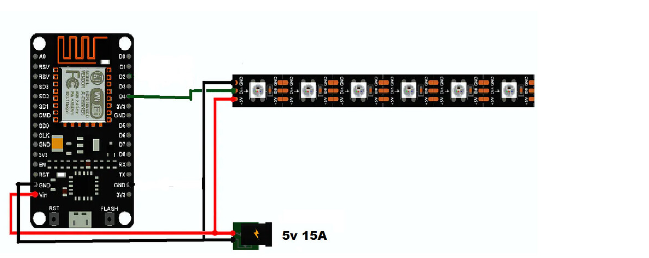
פיתוח בקר לדים WS2812B LED Strip EPS32
The WS2812B addressable LED strip comes in several models that differ in size, sealant or LED density. Choose the one that best fits your purposes.
In the following figure you can see a WS2812B LED strip. It is 5 meters long and the LEDs are enclosed in a weatherproof silicone. So, they can be left outside at the rain and dust without any problem.
This LED strip is made by WS2812B LEDs wired in series. These LEDs have an IC built right into the LED. This allows a communication via a one-wire interface. This means that you can control lots of LEDs using just one digital pin of your esp32.

nstalling the Adafruit_NeoPixel library
-
Click here to download the Adafruit_NeoPixel library. You should have a .zip folder in your Downloads folder
-
Unzip the .zip folder and you should get Adafruit_NeoPixel-master folder
-
Rename your folder from Adafruit_NeoPixel-master to Adafruit_NeoPixel
-
Move the Adafruit_NeoPixel folder to your Arduino IDE installation libraries folder
-
Finally, re-open your Arduino IDE
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
#include <Adafruit_NeoPixel.h> #define PIN 4 #define N_LEDS 60 Adafruit_NeoPixel strip = Adafruit_NeoPixel(N_LEDS, PIN, NEO_GRB + NEO_KHZ800); void setup() { strip.begin(); } void loop() { chase(strip.Color(255, 0, 0)); // Red chase(strip.Color(0, 255, 0)); // Green chase(strip.Color(0, 0, 255)); // Blue } static void chase(uint32_t c) { for(uint16_t i=0; i<strip.numPixels()+4; i++) { strip.setPixelColor(i , c); // Draw new pixel strip.setPixelColor(i-4, 0); // Erase pixel a few steps back strip.show(); delay(25); } } |
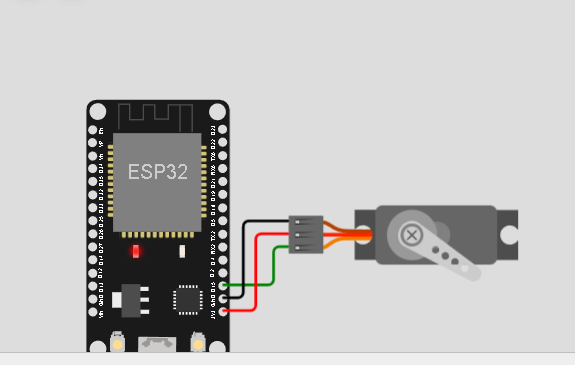
שימוש ב SERVO ESP32
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
#include <ESP32Servo.h> Servo myservo; int pos = 0; void setup(){ myservo.attach(15); Serial.begin(115200); } void loop(){ for (pos = 0; pos <= 180; pos += 1){ myservo.write(pos); delay(15); Serial.println(pos); } for (pos = 180; pos >= 0; pos -= 1){ myservo.write(pos); delay(15); Serial.println(pos); } } |
esp32 פיתוח מצלמה
מדידת זמן פולס :
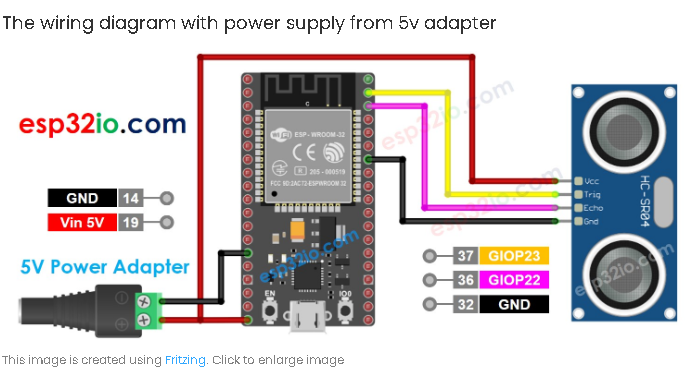
pulseIn(pin, value)
pulseIn(pin, value, timeout)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
/* * This ESP32 code is created by esp32io.com * * This ESP32 code is released in the public domain * * For more detail (instruction and wiring diagram), visit https://esp32io.com/tutorials/esp32-ultrasonic-sensor */ #define TRIG_PIN 23 // ESP32 pin GIOP23 connected to Ultrasonic Sensor's TRIG pin #define ECHO_PIN 22 // ESP32 pin GIOP22 connected to Ultrasonic Sensor's ECHO pin float duration_us, distance_cm; void setup() { // begin serial port Serial.begin (9600); // configure the trigger pin to output mode pinMode(TRIG_PIN, OUTPUT); // configure the echo pin to input mode pinMode(ECHO_PIN, INPUT); } void loop() { // generate 10-microsecond pulse to TRIG pin digitalWrite(TRIG_PIN, HIGH); delayMicroseconds(10); digitalWrite(TRIG_PIN, LOW); // measure duration of pulse from ECHO pin duration_us = pulseIn(ECHO_PIN, HIGH); // calculate the distance distance_cm = 0.017 * duration_us; // print the value to Serial Monitor Serial.print("distance: "); Serial.print(distance_cm); Serial.println(" cm"); delay(500); |
קישורים לאתר עם דוגמאות :
https://esp32io.com/tutorials/esp32-ultrasonic-sensor
https://espblockly.com/ESPtoESP.html
אתר מעולה בנושא וואי פאי ב ESP32
https://www.upesy.com/blogs/tutorials/how-to-connect-wifi-acces-point-with-esp32
esp32 pwm
TMR NGUKV CBUAhttps://www.upesy.com/blogs/tutorials/how-to-use-pwm-on-esp32-with-examples