קורס RB07 רובטיקס בלוקס 020 : זרוע רובוטית – תרגול תכנות סקראץ – לימוד תכנות
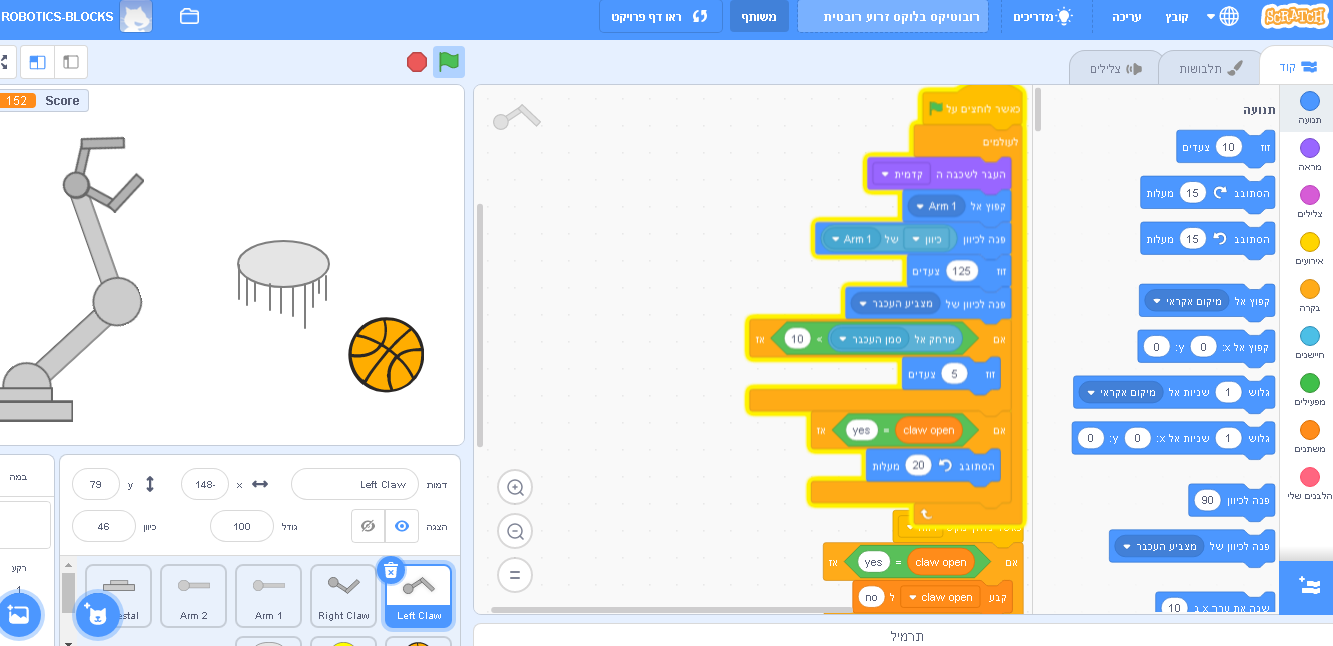
קישור לתוכנה 2 https://scratch.mit.edu/projects/855573707/editor/
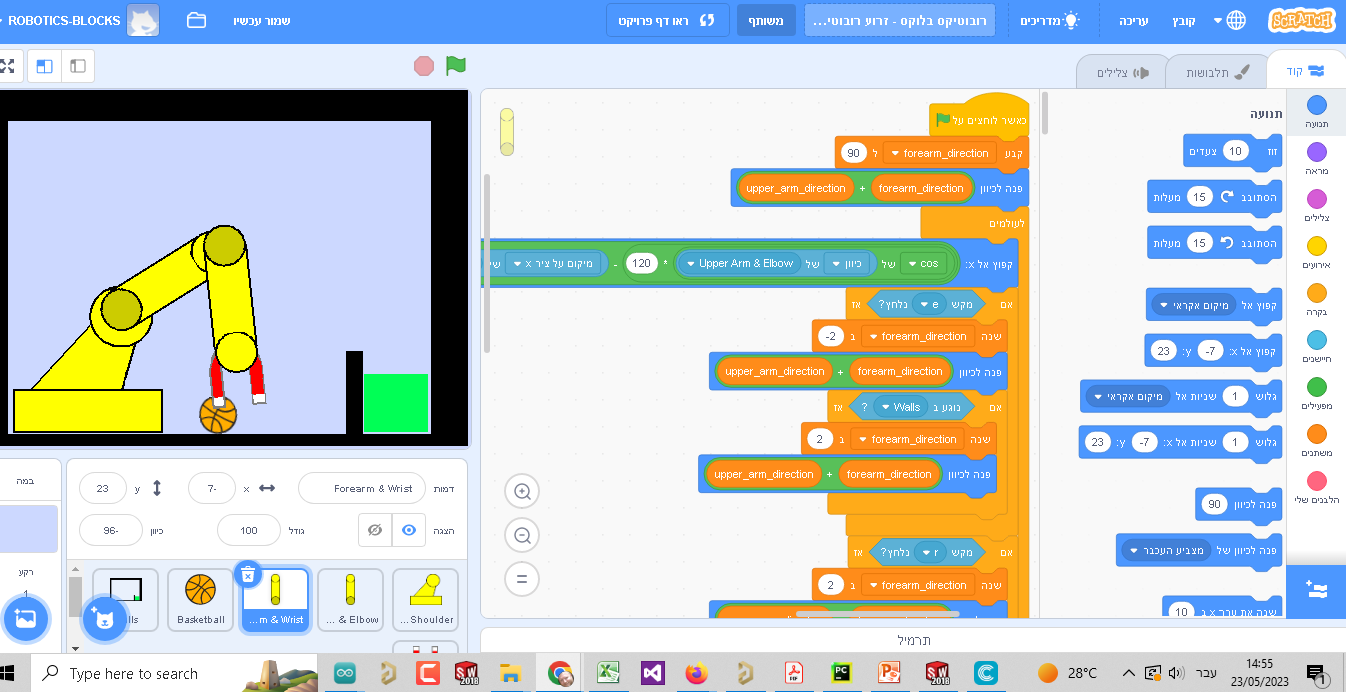
קישור תוכנה 3 : https://scratch.mit.edu/projects/855581750
רובטיקה בתי ספר
פיתוח זרוע רובוטית
ROBOT GRIPPER


התפסן – הגירפר
כדי לזהות מתי כפתור התפסה של המחזיק הרובוטי מחזיק את אובייקט היעד ולעצור את מנוע הסרו, ניתן להשתמש בטכניקות חיישן שונות ומנגנוני משוב. הנה גישה כללית להשגת המטרה:
1. עיצוב המחזיק: ודא כי למחזיק הרובוטי יש מנגנון או אצבעות שמאפשרים לו לאחוז באובייקט היעד באופן מוצק. המחזיק צריך לספק כוח מספיק ויציבות באחיזה.
2. חיישן כוח/טורק: שלב חיישן כוח או טורק למכניקה של המחזיק. החיישן יזהה את הכוח שהמחזיק משפיע על אובייקט היעד.
3. בקרת הסרו: חבר את מנוע הסרו למכניקה של המחזיק. יהיה עליך להשתמש במיקרו-בקר או מערכת בקרה דומה כדי לשדרג את מנוע הסרו ולקרוא נתונים מהחיישן כוח/טורק.
4. כיוונון: לפני השימוש במחזיק, יש לכוון את חיישן הכוח/טורק כדי לקבוע את הקריאות הבסיס של הכוח כאשר המחזיק ריק ואינו אוחז באובייקט.
5. זיהוי אובייקט היעד: השתמש בראיית מחשב או טכניקות חיישן אחרות כדי לזהות את האובייק