רובוטרוניקס – פיתוח מערכות רובוטיות מבוססות בינה מלאוכתית
הגנה על רחפנים במהלך טיסה בפנים של מבנים במקומות מצומצמים: אתגרים ופתרונות – רובוטרוניקס
תקציר: טיסת רחפנים בפנים במקומות מצומצמים מהווה אתגרים ייחודיים עקב המכשולים ותנאי הסביבה כגון חלקיקי אבק וחול. מאמר זה חוקר אפשרויות להגנה על רחפנים במהלך טיסות בפנים, כולל השימוש בחיישנים ובתוכניות הגנה. בנוסף, נדון בסוגי חיישנים המתאימים וביישומיהם בניווט של רחפנים במהלך טיסות בפנים, כולל בסביבות המכילות חלקיקי אבק וחול באוויר.
מבוא: השימוש ברחפנים לצורכי שונים הגדיל את הצורך ביכולות טיסה בפנים, במיוחד במקומות מצומצמים כגון בתי מגורים, מנהרות וצינורות. אולם, הטיסה של רחפנים בסביבות אלו מונה אתגרים משמעותיים, כולל התנגשויות עם מכשולים וחשיפה לחלקיקים מעופפים היכולים לגרום נזק לרכיבים הרגישים. מאמר זה עוסק באתגרים הקשורים לטיסת רחפנים בפנים ומבקש פתרונות אפשריים להפחתת הסיכון הנובע מהמצב הזה.
אתגרים:
- מניעת התנגשויות: מקומות פנים בנויים ממספר מכשולים כמו קירות, רהיטים ומכונות, מה שמקשה על ניווט בטיסת הרחפנים.
- מכשולים סביבתיים: חלקיקי אבק וחול המעופפים באוויר עלולים להיות מסוכנים לרכיבים הרגישים של הרחפנים.
- תנודתיות מוגבלת: המקומות הצפופים מגבילים את תנודתיות הרחפנים, מה שמגביר את הסיכון להתנגשויות ותאונות.
פתרונות:
- ניווט בהתבסס על חיישנים:
- LiDAR (זיהוי ומדידת אור): חיישני LiDAR יכולים לספק מדידות מדויקות של מרחקים, מאפשרים לרחפנים לזהות מכשולים ולנווט בבטיחות במקומות מצומצמים.
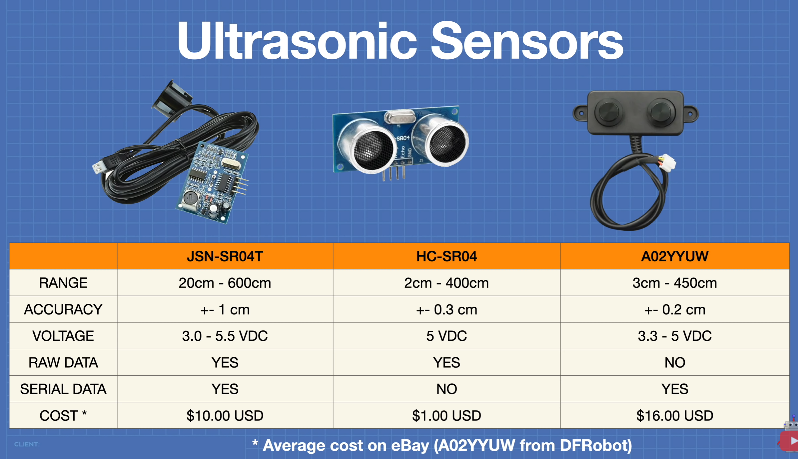
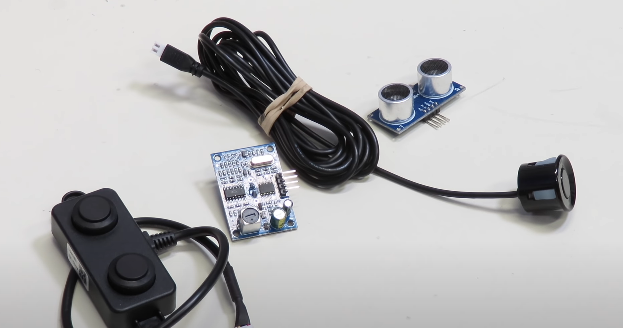
- חיישני אולטרסוניים: חיישנים אולטרסוניים יעילים לזיהוי מכשולים במרחק קצר ויכולים להשלים את מערכות ה-LiDAR בסביבות פנים.
- חיישני אינפרה-אדום: חיישני אינפרה-אדום יכולים לזהות חתמי חום ולעזור לרחפנים לנווט בתנאי תאורה נמוכה או באזורים עם ראייה מוגבלת.
- מערכות מניעת התנגשויות:
- הטמעת אלגוריתמים לזיהוי ומניעת מכשולים בזמן אמת עשויים לשפר את יכולת הניווט של הרחפן בסביבות מוצפנות.
- השימוש בטכניקות ראייה ממוחשבת, כגון זיהוי ומעקב אובייקטים, לזיהוי ומניעת מכשולים בנתיב הרחפן.
- אמצעי הגנה:
- מעטפות ומגנים: התקנת מעטפות או מגנים מגן סביב רכיבים חשובים יכולה להגן עליהם מחלקיקים מעופפים וזיהומים.
- מערכות סינון אוויר: שילוב מערכות סינון אוויר בעיצוב הרחפן יכול להפחית את הסיכון להידבקות של חלקיקי אבק וחול, ולהאריך את חיי העבודה של רכיבים רגישים.
בחירת חיישנים: כאשר מפעילים רחפנים בסביבות המכילות אבק וחול מעופפים, חיישנים חזקים הינם חיוניים לקיומם. כמה אפשרויות חיישנים הכוללים:
- חיישני LiDAR בדרגת עמידות IP67/IP68: מעמידים פני אבק ומים, חיישנים אלו מספקים יכולות זיהוי מכשולים מהימנות.
- חיישני אולטרסוניים מסוגסגונים: מותאמים לפעולה בסביבות פולשניות, חיישנים אלו מספקים זיהוי מהימן למרחקים קצרים למניעת מכשולים.
- חיישני אינפרה-אדום תעשייתיים: מיועדים ליישומים קשים, חיישנים אלו יכולים לעמוד בתנאים קשים ולספק מדידות מדויקות של מרחקים.
מסקנה: טיסת רחפנים בפנים במקומות מצומצמים מהווה אתגרים משמעותיים, כולל מניעת התנגשויות והגנה מפני מכשולים סביבתיים כמו אבק וחול. על ידי שילוב מערכות ניווט בהתבסס על חיישנים ואמצעי הגנה, רחפנים יכולים לטוס בבטיחות וביעילות בסביבות פנים. בחירת חיישנים חזקים שמסוגלים לפעול בתנאים סביבתיים קשים חיונית להבטחת יציבות וביצועים של מערכות הרחפן בפנים.
הסימונים:
- "חיישני LiDAR ליישומי רחפנים"
- "חיישני אולטרסוניים למניעת התנגשויות של רחפנים"
- "חיישני אינפרה-אדום לאוטומציה תעשייתית"
- "מעטפות הגנה לרכיבי רחפנים"
- "מערכות סינון אוויר ליישומי רחפנים"
פיתוח רחפן : פיתוח מערכות הגנה בזמן טיסה
רובוטרוניקס – פיתוח רובוטיקה לרחפנים מוטסת מבוססת בינה מלאוכתית
לימוד מוכנה הוא תחום בתחום הבינה מלאכותית שמתמקד בשימוש באלגוריתמים ובמודלים של למידת מכונה כדי לאפשר למערכות לרכוש יכולת למידה ושיפור עצמי בזמן ריצה. כאשר מדובר בשילוב של רחפן עם סנסנורים בתוך פיסקה כלשהי, לימוד מוכנה יכול לתרום באופן משמעותי ליכולת הפעלה, ניווט והתמצאות של הרחפן בסביבות מסובכות ומסוימות. הנה כמה מודלים של למידת מכונה ובינה מלאכותית שיכולים להיות שימושיים בשילוב עם רחפנים וסנסנורים:
- רשתות נוירונים עמוקות (Deep Neural Networks – DNN): רשתות נוירונים עמוקות הן מודלים תפעוליים שמשתמשים ביישומים של למידת מכונה לידע בתחומים רבים. ניתן להשתמש ב-DNN לניתוח נתונים מסנסורים ברחפן, לזיהוי אובייקטים ומכשולים בסביבה, ולקבלת החלטות מהירות ויעילות בנוגע לניווט ופעולת הרחפן.
- רשתות נוירונים היררכיות (Hierarchical Neural Networks): רשתות נוירונים היררכיות מאפשרות לקבוע היררכיה של המידע ולטפל בו בהתאם. זהו יתרון בסביבות עם תמיכה בהחלטות מורכבות יותר וניווט מתוחכם יותר של הרחפן בסביבתו.
- רשתות נוירונים רקורסיביות (Recurrent Neural Networks – RNN): RNN מתמקדות בעיבוד של נתונים בהתבסס על סדר זמן. זהו חשיבותי ביישום תהליכים כמו הבנת מצב סביבתי של הרחפן, תחזיות תנועה ומגמות, והתאמה עצמית לשינויים בסביבה.
- למידת תכנות עמוקה (Deep Reinforcement Learning): תכנות עמוק משלב למידת מכונה עם תכנות לתמיכה בנסיעה אוטונומית. כאן, הרחפן יכול ללמוד מהפעולות שלו ולהתאים את ההתנהגות שלו בהתאם לפרטי הסביבה.
- מודלי למידת עמוקה לעיבוד תמונה (Convolutional Neural Networks – CNN): מודלים אלו מתמקדים בעיבוד וניתוח תמונות. הם יכולים לשמש לזיהוי אובייקטים בתמונות שמצלמות הרחפן רואות, לצורך התמצאות בסביבה ולניווט.
שילוב של מודלים אלו עם רחפנים וסנסנורים יכול לאפשר לרחפן להשיג יכולת ניווט מתקדמת ולהתמודד עם סביבות מסובכות באופן יעיל ובטוח.