לימוד ארדואינו : שיעור 6 לולאות קורס C506
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 |
// robotronix.co.il int i=0; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { Serial.print("i = "); Serial.println(i); delay(1000); } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(i=1;i<=10;i++) // i++; i=i+1; { Serial.print("i = "); Serial.println(i); delay(1000); } Serial.println("---------------------------"); } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(i=1;i<=10;i++) // i++; i=i+1; { if(i==1) { Serial.println("start"); } Serial.print("i = "); Serial.println(i); if(i==10) { Serial.println("end"); } delay(1000); } exit(0); // 0 if all o.k , 1 if error } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(i=1;i<=10;i++) // i++; i=i+1; { if(i==1) { Serial.println("start"); } Serial.print("i = "); Serial.println(i); if ( (i>=2 ) && (i<=4) ) // 2 ,3, 4 { Serial.println("Open water"); } else { Serial.println("close water"); } if(i==10) { Serial.println("end"); } delay(1000); } exit(0); // 0 if all o.k , 1 if error , STOP END PROGRAM } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; int j=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(i=0;i<=9;i++) // 0,1,2,3,4,5,6,7,8,9 { Serial.print("i = "); Serial.print(i); Serial.print(" , i+1= "); Serial.println(i+1); // is not Changing the value of i delay(500); } exit(0); // 0 if all o.k , 1 if error , STOP END PROGRAM } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; int j=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(j=0;j<=1;j++) // 0,1 total 2 { Serial.print("j = "); Serial.println(j); delay(100); for(i=0;i<=3;i++) // 0,1,2,3 total 4 { Serial.print(" [j ,i]= [ "); Serial.print(j); Serial.print(" , "); Serial.print(i); Serial.println("]"); delay(500); } // i++ } // j++ exit(0); // 0 if all o.k , 1 if error , STOP END PROGRAM } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 |
// robotronix.co.il // i=i+1; // i++; <==> i=i+1; // i--; <==> i=i-1; int i=10; int j=10; void setup() { // put your setup code here, to run once: Serial.begin(115200); Serial.println("Program start "); } void loop() { for(j=0;j<=3;j++) // 0,1,2,3 total 24 { Serial.print("j = "); Serial.println(j); delay(100); for(i=0;i<=3;i++) // 0,1,2,3 total 4 { if( j==i ) { Serial.print(" i == j "); Serial.print(" --> [j ,i]= [ "); Serial.print(j); Serial.print(" , "); Serial.print(i); Serial.println("]"); delay(500); } else { Serial.print(" [j ,i]= [ "); Serial.print(j); Serial.print(" , "); Serial.print(i); Serial.println("]"); delay(500); } } // i++ } // j++ exit(0); // 0 if all o.k , 1 if error , STOP END PROGRAM } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 |
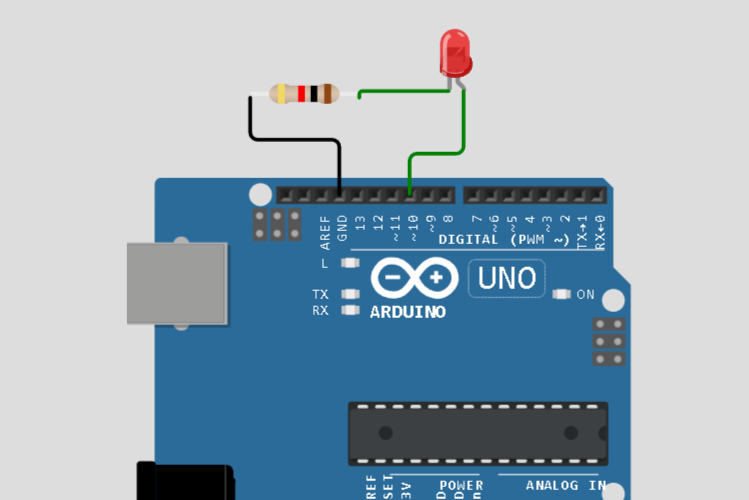
// robotronix.co.il // Dim an LED -analogWrite int PIN_DIMMER = 10; // LED in series with 470 ohm resistor on pin 10 void setup() { // no setup needed } void loop() { for (int i = 0; i <= 255; i=i+10) { analogWrite(PIN_DIMMER, i); // analog write i delay(10); // 20 ms if(i==0) { delay(1500); // 1500 ms = 1.5 sec (1000ms = 1 sec) } } } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 |
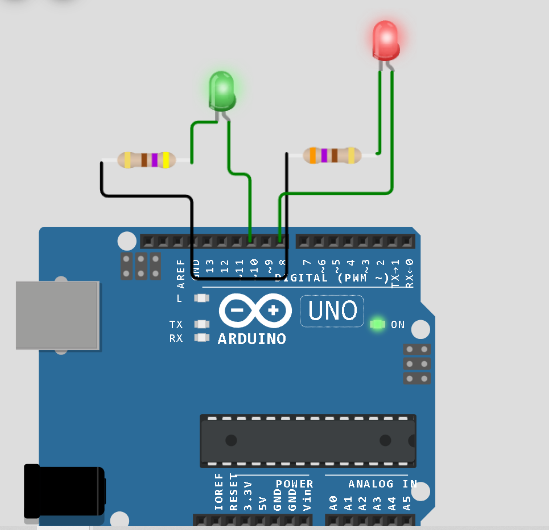
// robotronix.co.il // Dim an LED -analogWrite int PIN_DIMMER = 10; // LED in series with 470 ohm resistor on pin 10 int j=255; void setup() { // no setup needed } void loop() { for (int i = 0,j=255; i <= 255; i=i+10) { analogWrite(PIN_DIMMER, i); // analog write i analogWrite(8, j); // analog write i delay(10); // 20 ms if(i==0) { delay(1000); // 1500 ms = 1.5 sec (1000ms = 1 sec) } j=j-10; } } |