פיתוח זרוע רובוטית
ROBOT GRIPPER


-
כיצג הזרוע הרובטית יודעת שתפסה חלק ?
התפסן – הגירפר
כדי לזהות מתי כפתור התפסה של המחזיק הרובוטי מחזיק את אובייקט היעד ולעצור את מנוע הסרו, ניתן להשתמש בטכניקות חיישן שונות ומנגנוני משוב. הנה גישה כללית להשגת המטרה:
1. עיצוב המחזיק: ודא כי למחזיק הרובוטי יש מנגנון או אצבעות שמאפשרים לו לאחוז באובייקט היעד באופן מוצק. המחזיק צריך לספק כוח מספיק ויציבות באחיזה.
2. חיישן כוח/טורק: שלב חיישן כוח או טורק למכניקה של המחזיק. החיישן יזהה את הכוח שהמחזיק משפיע על אובייקט היעד.
3. בקרת הסרו: חבר את מנוע הסרו למכניקה של המחזיק. יהיה עליך להשתמש במיקרו-בקר או מערכת בקרה דומה כדי לשדרג את מנוע הסרו ולקרוא נתונים מהחיישן כוח/טורק.
4. כיוונון: לפני השימוש במחזיק, יש לכוון את חיישן הכוח/טורק כדי לקבוע את הקריאות הבסיס של הכוח כאשר המחזיק ריק ואינו אוחז באובייקט.
5. זיהוי אובייקט היעד: השתמש בראיית מחשב או טכניקות חיישן אחרות כדי לזהות את האובייק
תרגיל – כיתה זרוע רובוטית

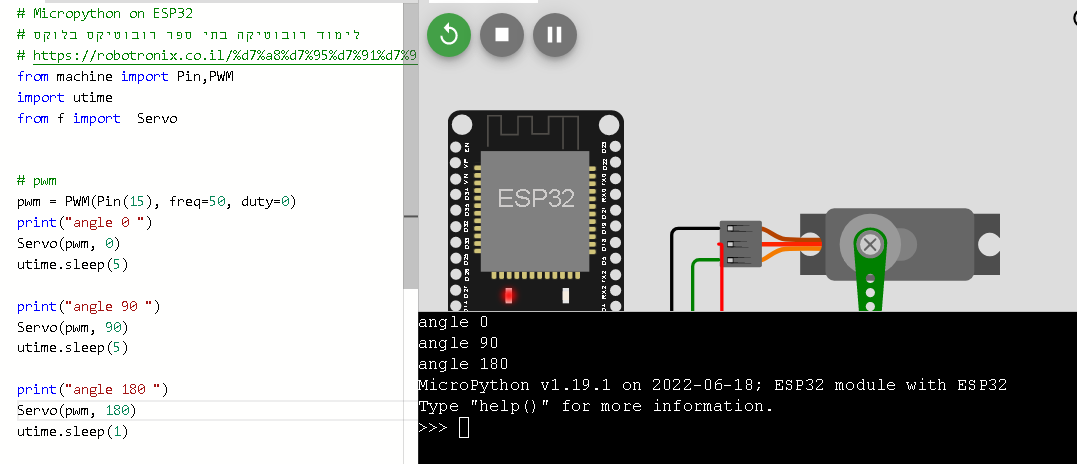
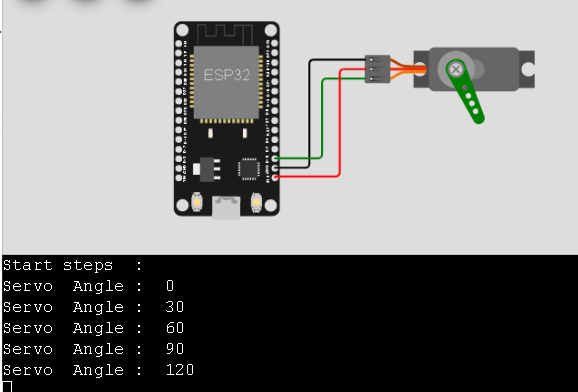
בשיעור זה נלמד להפעיל מנוע רובוטי בשם סרבו
בשיעור הבא נילמד על זרוע רובותית ונתכנת אותה
- הפעל את התוכנית הבאה https://wokwi.com/projects/364657119873076225
1.1 שנה את קוד הותכנית לזוויות 0 , 30 , 60 , 90 מעלות
1.2 מה תפקיד הפקודה ![]()
1.3 שנה את הפקודה של שינה ל 15 שניות
2.בנה תוכנה שתזיז את מנוע הסרבו הורובטי על ידי משתנים
2.1 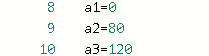
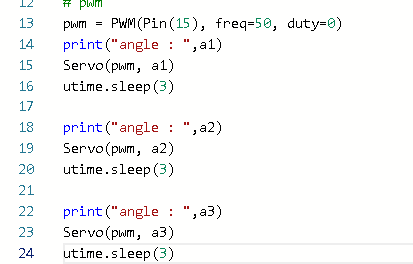
2.3 הפעל את התוכנה https://wokwi.com/projects/364658132388574209

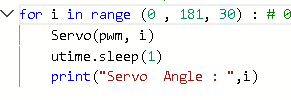
3.הפעל את התוכנה הבאה : https://wokwi.com/projects/354167148568212481 בתוכנה זאת הוספנו לiלאה FOR
 ,
,
3.1. מה עושה התוכנה ?
3.2 הוסף לד בצבע ירוק למיקרו בקר – שידלק בזמן התכונה לפין מספר 2 – ראה שיעור RS02 להסבר
3.3 כבה לד בפין 2 בסיום התכונה
https://wokwi.com/projects/365297917394963457
4.שיעורי בית
4.1 הוסף לד בצבע אדום
4.2 תכנת את הלד שיהיה במצב כבוי בתחילת התוכנה ומצב דלקו בסיום התכונה .