RB10 : שיעור 016 – שימוש במסך OLED – מבוא לפונקציות , משפט תנאי , לימוד רובוטיקה
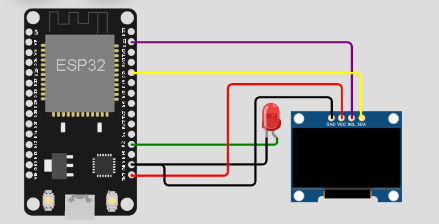
1 נבנה את הפרוייקט
נגיש לאתר https://wokwi.com/
2.נעתיק את הקוד
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 |
# www.robotronix.co.il robotics blocks # חוג רובוטיקה , מיקרו פייתון , רובוטיקס בלוקס # https://robotronix.co.il/%d7%a8%d7%95%d7%91%d7%95%d7%98%d7%a8%d7%95%d7%a0%d7%99%d7%a7%d7%a1-%d7%9b%d7%9c%d7%9c%d7%99/%d7%97%d7%95%d7%92-%d7%a8%d7%95%d7%91%d7%95%d7%98%d7%99%d7%a7%d7%94-%d7%a1%d7%a4%d7%a8%d7%99%d7%99%d7%aa-%d7%93%d7%95%d7%92%d7%9e%d7%90%d7%95%d7%aa-%d7%9e%d7%99%d7%a7%d7%a8%d7%95-%d7%a4%d7%99/ import time from machine import Pin, I2C import ssd1306 print("Hello, Robotics blocks - led + oled ") led = Pin(2,Pin.OUT) # ESP32 Pin assignment i2c = I2C(0, scl=Pin(22), sda=Pin(21)) oled_width = 128 oled_height = 64 oled = ssd1306.SSD1306_I2C(oled_width, oled_height, i2c) oled.text('Robotics Blocks', 2, 10) oled.text('Led + I2c example ', 2, 26) oled.show() time.sleep(3) c=0 while True: led.value(1) oled.fill(0) oled.text('Robotics Blocks', 2, 10) oled.text('led on - 0V', 2, 26) oled.text('c : ' + str(c), 2, 36) oled.show() time.sleep(2) led.value(0) oled.fill(0) oled.text('Robotics Blocks', 2, 10) oled.text('led off - 3.3V', 2, 26) oled.text('c : ' + str(c), 2, 36) oled.show() time.sleep(2) c=c+1 |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 |
{ "version": 1, "author": "yaniv maor , robotics blocks ", "editor": "wokwi", "parts": [ { "type": "wokwi-esp32-devkit-v1", "id": "esp", "top": -39.35, "left": -47.42, "attrs": { "env": "micropython-20220618-v1.19.1" } }, { "type": "wokwi-led", "id": "led1", "top": 43.12, "left": 165.95, "attrs": { "color": "red" } }, { "type": "board-ssd1306", "id": "oled1", "top": 59.59, "left": 204.23, "attrs": {} } ], "connections": [ [ "esp:TX0", "$serialMonitor:RX", "", [] ], [ "esp:RX0", "$serialMonitor:TX", "", [] ], [ "led1:A", "esp:D2", "green", [ "v0" ] ], [ "led1:C", "esp:GND.1", "black", [ "v0" ] ], [ "esp:3V3", "oled1:VCC", "red", [ "v1.03", "h90.73", "v-86.18", "h52.53" ] ], [ "oled1:SCL", "esp:D22", "purple", [ "v0" ] ], [ "esp:D21", "oled1:SDA", "yellow", [ "h215.99", "v5.5" ] ], [ "oled1:GND", "esp:GND.1", "black", [ "v-19.68", "h-71.88", "v82.94", "h-85.68", "v-19.14" ] ] ], "dependencies": {} } |
1.1 הוספת ספרייה במיקרופייתון ב WOKWI :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 |
#MicroPython SSD1306 OLED driver, I2C and SPI interfaces created by Adafruit import time import framebuf # register definitions SET_CONTRAST = const(0x81) SET_ENTIRE_ON = const(0xa4) SET_NORM_INV = const(0xa6) SET_DISP = const(0xae) SET_MEM_ADDR = const(0x20) SET_COL_ADDR = const(0x21) SET_PAGE_ADDR = const(0x22) SET_DISP_START_LINE = const(0x40) SET_SEG_REMAP = const(0xa0) SET_MUX_RATIO = const(0xa8) SET_COM_OUT_DIR = const(0xc0) SET_DISP_OFFSET = const(0xd3) SET_COM_PIN_CFG = const(0xda) SET_DISP_CLK_DIV = const(0xd5) SET_PRECHARGE = const(0xd9) SET_VCOM_DESEL = const(0xdb) SET_CHARGE_PUMP = const(0x8d) class SSD1306: def __init__(self, width, height, external_vcc): self.width = width self.height = height self.external_vcc = external_vcc self.pages = self.height // 8 # Note the subclass must initialize self.framebuf to a framebuffer. # This is necessary because the underlying data buffer is different # between I2C and SPI implementations (I2C needs an extra byte). self.poweron() self.init_display() def init_display(self): for cmd in ( SET_DISP | 0x00, # off # address setting SET_MEM_ADDR, 0x00, # horizontal # resolution and layout SET_DISP_START_LINE | 0x00, SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0 SET_MUX_RATIO, self.height - 1, SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0 SET_DISP_OFFSET, 0x00, SET_COM_PIN_CFG, 0x02 if self.height == 32 else 0x12, # timing and driving scheme SET_DISP_CLK_DIV, 0x80, SET_PRECHARGE, 0x22 if self.external_vcc else 0xf1, SET_VCOM_DESEL, 0x30, # 0.83*Vcc # display SET_CONTRAST, 0xff, # maximum SET_ENTIRE_ON, # output follows RAM contents SET_NORM_INV, # not inverted # charge pump SET_CHARGE_PUMP, 0x10 if self.external_vcc else 0x14, SET_DISP | 0x01): # on self.write_cmd(cmd) self.fill(0) self.show() def poweroff(self): self.write_cmd(SET_DISP | 0x00) def contrast(self, contrast): self.write_cmd(SET_CONTRAST) self.write_cmd(contrast) def invert(self, invert): self.write_cmd(SET_NORM_INV | (invert & 1)) def show(self): x0 = 0 x1 = self.width - 1 if self.width == 64: # displays with width of 64 pixels are shifted by 32 x0 += 32 x1 += 32 self.write_cmd(SET_COL_ADDR) self.write_cmd(x0) self.write_cmd(x1) self.write_cmd(SET_PAGE_ADDR) self.write_cmd(0) self.write_cmd(self.pages - 1) self.write_framebuf() def fill(self, col): self.framebuf.fill(col) def pixel(self, x, y, col): self.framebuf.pixel(x, y, col) def scroll(self, dx, dy): self.framebuf.scroll(dx, dy) def text(self, string, x, y, col=1): self.framebuf.text(string, x, y, col) class SSD1306_I2C(SSD1306): def __init__(self, width, height, i2c, addr=0x3c, external_vcc=False): self.i2c = i2c self.addr = addr self.temp = bytearray(2) # Add an extra byte to the data buffer to hold an I2C data/command byte # to use hardware-compatible I2C transactions. A memoryview of the # buffer is used to mask this byte from the framebuffer operations # (without a major memory hit as memoryview doesn't copy to a separate # buffer). self.buffer = bytearray(((height // 8) * width) + 1) self.buffer[0] = 0x40 # Set first byte of data buffer to Co=0, D/C=1 self.framebuf = framebuf.FrameBuffer1(memoryview(self.buffer)[1:], width, height) super().__init__(width, height, external_vcc) def write_cmd(self, cmd): self.temp[0] = 0x80 # Co=1, D/C#=0 self.temp[1] = cmd self.i2c.writeto(self.addr, self.temp) def write_framebuf(self): # Blast out the frame buffer using a single I2C transaction to support # hardware I2C interfaces. self.i2c.writeto(self.addr, self.buffer) def poweron(self): pass class SSD1306_SPI(SSD1306): def __init__(self, width, height, spi, dc, res, cs, external_vcc=False): self.rate = 10 * 1024 * 1024 dc.init(dc.OUT, value=0) res.init(res.OUT, value=0) cs.init(cs.OUT, value=1) self.spi = spi self.dc = dc self.res = res self.cs = cs self.buffer = bytearray((height // 8) * width) self.framebuf = framebuf.FrameBuffer1(self.buffer, width, height) super().__init__(width, height, external_vcc) def write_cmd(self, cmd): self.spi.init(baudrate=self.rate, polarity=0, phase=0) self.cs.high() self.dc.low() self.cs.low() self.spi.write(bytearray([cmd])) self.cs.high() def write_framebuf(self): self.spi.init(baudrate=self.rate, polarity=0, phase=0) self.cs.high() self.dc.high() self.cs.low() self.spi.write(self.buffer) self.cs.high() def poweron(self): self.res.high() time.sleep_ms(1) self.res.low() time.sleep_ms(10) self.res.high() |
2.2 הרץ את התכונה – המורה יעבור על התוכנית שורה שורה
2.3 שנה שהלד יהבהב כל 4 שניות
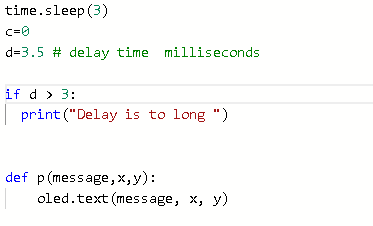
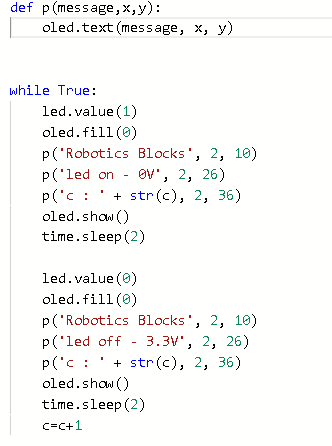
2.5 בניית פונקציה פשוטה : שנה את קוד התוכנה
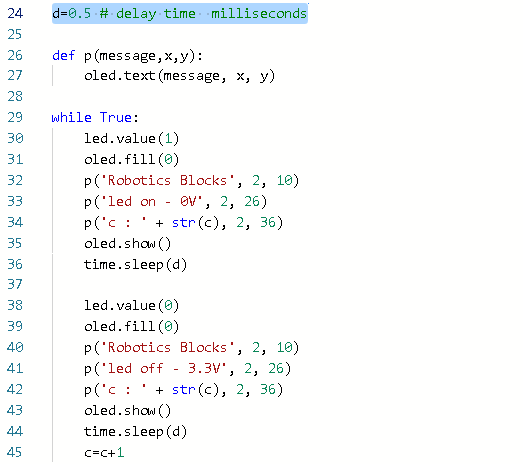
2.6 הוסף משתנה גלובלי d = משתנה זה יגדיר את זמן השהייה
2.7 הוסף משפט תנאי :
אם זמן d גדול מ 3 שניות -רשום הודע לטרמניל זמן גדול מ 3 שניות