קורס : בינה מלאכותית בחקלאות
בינה מלאכותית בחקלאות: מודלים מבוססי רשתות נוירונים ויישומם בפתרון בעיות חקלאיות
 בינה מלאכותית בחקלאות נשענת יותר ויותר על מודלים של רשתות נוירונים, משום שבעיות חקלאיות הן לרוב מורכבות, לא ליניאריות, ורבות מהן משלבות תמונה, זמן, חיישנים וסביבה משתנה. רשת נוירונים מאפשרת ללמוד קשרים מורכבים בין נתונים סביבתיים, נתוני קרקע, תמונות צמחים, מדדי אקלים ותוצאות אמת בשטח. כאשר משלבים רשת נוירונים בתוך מערכת בינה מלאכותית בחקלאות, המודל אינו רק מזהה תופעה קיימת, אלא גם יכול לחזות מגמות, לסווג בעיות, לאתר חריגות ולהפעיל תגובה מדויקת.
בינה מלאכותית בחקלאות נשענת יותר ויותר על מודלים של רשתות נוירונים, משום שבעיות חקלאיות הן לרוב מורכבות, לא ליניאריות, ורבות מהן משלבות תמונה, זמן, חיישנים וסביבה משתנה. רשת נוירונים מאפשרת ללמוד קשרים מורכבים בין נתונים סביבתיים, נתוני קרקע, תמונות צמחים, מדדי אקלים ותוצאות אמת בשטח. כאשר משלבים רשת נוירונים בתוך מערכת בינה מלאכותית בחקלאות, המודל אינו רק מזהה תופעה קיימת, אלא גם יכול לחזות מגמות, לסווג בעיות, לאתר חריגות ולהפעיל תגובה מדויקת.
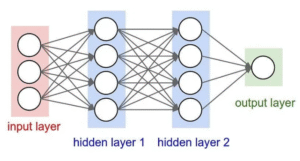
המודל הבסיסי ביותר הוא MLP, כלומר Multi-Layer Perceptron. זוהי רשת נוירונים מלאה שבה הקלט יכול להיות ערכים מספריים כגון לחות קרקע, טמפרטורה, מוליכות, pH, רמת אור, דישון קודם וזמני השקיה. בינה מלאכותית בחקלאות משתמשת ב-MLP כאשר הבעיה מבוססת בעיקר על נתוני חיישנים טבלאיים. לדוגמה, אם רוצים לחזות האם הצמח עומד להיכנס לעקת מים, רשת MLP מקבלת רצף של מדידות מהקרקע ומהסביבה ומחזירה תחזית של סיכון, כמות מים נדרשת או הסתברות לבעיה. כך רשת נוירונים משתלבת במערכת השקיה חכמה ומאפשרת שליטה טובה יותר על לחות הקרקע.
כאשר עוסקים בנתונים סדרתיים לאורך זמן, המודל המתאים יותר הוא LSTM, שהוא סוג של Recurrent Neural Network. בינה מלאכותית בחקלאות משתמשת ב-LSTM כדי ללמוד איך משתנים כמו לחות, טמפרטורה, קרינה, רוח ודישון משפיעים לאורך זמן על מצב הגידול. בניגוד לרשת רגילה, LSTM שומר זיכרון של מדידות קודמות ולכן מתאים מאוד לחיזוי. למשל, עבור חיזוי לחות קרקע, המודל מקבל היסטוריה של נתוני חיישנים מכמה שעות או ימים אחרונים, ולומד לחזות מתי הקרקע תגיע למצב קריטי. באותו אופן ניתן להשתמש ב-LSTM גם לחיזוי התפרצות מחלה, הופעת מזיקים או ירידה בקצב צמיחה. השילוב בפועל הוא כזה: החיישנים אוספים נתונים, הרשת מבצעת חיזוי, והמערכת מפעילה התרעה או פעולה אוטומטית.
מודל נוסף ממשפחת הרשתות הרציפות הוא GRU. זהו מודל דומה ל-LSTM אך פשוט וקל יותר חישובית. בינה מלאכותית בחקלאות יכולה לשלב GRU במערכות קצה שבהן כוח החישוב מוגבל, למשל בקר חכם בחממה או יחידת edge בשדה. GRU יכול לבצע חיזוי של לחות, דישון, שינויי אקלים מקומיים או סיכון למחלה תוך צריכת משאבים נמוכה יחסית. לכן הוא מתאים במיוחד כאשר רוצים לבנות מערכת בינה מלאכותית בחקלאות שפועלת מקומית ובזמן אמת.
כ אשר הנתונים מגיעים מתמונות, המודל המרכזי הוא CNN, כלומר Convolutional Neural Network. זהו אחד המודלים החשובים ביותר בתחום בינה מלאכותית בחקלאות. CNN מתאים לניתוח תמונות עלים, פירות, גבעולים, קרקע ושורות גידול. למשל, כדי לזהות מחלה בעלה, מצלמה מצלמת את העלה והרשת מחלצת תבניות מרחביות כמו כתמים, שינויי צבע, קצוות לא תקינים ומרקם חריג. לאחר האימון, רשת ה-CNN יכולה לסווג אם העלה בריא, חולה, סובל ממחסור תזונתי או פגוע ממזיקים. השילוב בפתרון פשוט: המצלמה מספקת תמונה, המודל מנתח, והמפעיל או הרובוט מקבלים החלטה. באופן זה בינה מלאכותית בחקלאות הופכת את הראייה הממוחשבת לכלי מרכזי בניטור אוטומטי.
אשר הנתונים מגיעים מתמונות, המודל המרכזי הוא CNN, כלומר Convolutional Neural Network. זהו אחד המודלים החשובים ביותר בתחום בינה מלאכותית בחקלאות. CNN מתאים לניתוח תמונות עלים, פירות, גבעולים, קרקע ושורות גידול. למשל, כדי לזהות מחלה בעלה, מצלמה מצלמת את העלה והרשת מחלצת תבניות מרחביות כמו כתמים, שינויי צבע, קצוות לא תקינים ומרקם חריג. לאחר האימון, רשת ה-CNN יכולה לסווג אם העלה בריא, חולה, סובל ממחסור תזונתי או פגוע ממזיקים. השילוב בפתרון פשוט: המצלמה מספקת תמונה, המודל מנתח, והמפעיל או הרובוט מקבלים החלטה. באופן זה בינה מלאכותית בחקלאות הופכת את הראייה הממוחשבת לכלי מרכזי בניטור אוטומטי.
מבנים מתקדמים של CNN כמו ResNet חשובים במיוחד כאשר רוצים דיוק גבוה יותר. ResNet היא רשת עמוקה מאוד עם חיבורי skip connections, המאפשרים ללמוד תבניות מורכבות מבלי לאבד מידע בשל עומק הרשת. בינה מלאכותית בחקלאות משתמשת ב-ResNet כאשר צריך להבחין בין מחלות דומות מאוד, בין רמות חומרה שונות של נזק, או בין מחסור תזונתי לבין עקה סביבתית. לדוגמה, עלה עם חוסר חנקן ועלה עם מחלה פטרייתית עשויים להיראות דומים לעין אנושית, אך ResNet יכולה ללמוד את ההבדלים הדקים. לכן היא משתלבת היטב במערכות אבחון מדויקות לחקלאות.
EfficientNet היא רשת נוירונים נוספת לניתוח תמונה, המתוכננת להשיג יחס טוב בין דיוק לבין יעילות חישובית. בינה מלאכותית בחקלאות יכולה לשלב EfficientNet במצלמות חכמות, ברחפנים או במערכות embedded, כאשר יש צורך לזהות מחלות, פגמים או מצב צמח בלי חומרה כבדה. זה חשוב במיוחד עבור מערכות שדה שבהן צריכת החשמל מוגבלת. השימוש המעשי הוא בזיהוי חזותי מדויק תוך שמירה על יכולת ריצה מהירה יחסית.
במשימות של זיהוי עצמים בתמונה, כמו זיהוי פרי, זיהוי חרק או זיהוי אזור נגוע, מודל מרכזי הוא YOLO. גם זה מודל מבוסס רשת נוירונים עמוקה. בינה מלאכותית בחקלאות משתמשת ב-YOLO כאשר לא מספיק לדעת שיש מחלה או שיש פרי, אלא צריך לדעת גם איפה בדיוק הוא נמצא בתמונה. לדוגמה, ברובוט קטיף, המצלמה מצלמת שורת עגבניות, והרשת מאתרת כל פרי בשל ומחזירה את המיקום שלו. כך הזרוע הרובוטית יודעת לאן להגיע. באותו אופן אפשר לזהות מזיקים על עלים, פירות פגומים, עשבים בין שורות או אזורים הדורשים טיפול נקודתי. השילוב כאן ישיר בין ראייה ממוחשבת לבין רובוטיקה חקלאית.
כאשר רוצים לא רק לזהות אובייקט אלא גם לסמן במדויק את גבולות האזור החולה או הפגוע, משתמשים במודל U-Net. זהו מודל רשת נוירונים למשימות segmentation. בינה מלאכותית בחקלאות משלבת U-Net בזיהוי אזורי מחלה על עלים, מדידת היקף נגע, הפרדת צמח מהרקע או זיהוי עשבייה בין גידולים. למשל, אם רוצים למדוד כמה אחוז מהעלה נגוע, לא מספיק לסווג את התמונה. צריך מיפוי פיקסל-לפיקסל. U-Net נותן בדיוק את זה. פתרון כזה חשוב מאוד כאשר רוצים לבצע ריסוס ממוקד או כימות חומרת המחלה.
מודלים ממשפחת Vision Transformer הופכים גם הם חשובים בתחום בינה מלאכותית בחקלאות. בניגוד ל-CNN שמתמקדת בעיקר בדפוסים מקומיים, Vision Transformer מסוגל ללמוד קשרים רחבים יותר בתמונה. זה מועיל כאשר יש תלות בין חלקים שונים של הצמח או השדה. לדוגמה, זיהוי מצב כולל של הצמח, הערכת איכות פרי, או אבחון מחלה שמשפיעה על אזורים שונים בו זמנית. השילוב של Vision Transformer מתאים במיוחד ליישומים מורכבים שבהם נדרש להבין מבנה גלובלי ולא רק תכונה מקומית.
Autoencoder הוא סוג אחר של רשת נוירונים, המשמש בעיקר לגילוי חריגות. בינה מלאכותית בחקלאות יכולה לשלב Autoencoder כאשר אין בהכרח דוגמאות רבות לכל סוג תקלה, אבל יש הרבה דוגמאות של מצב תקין. הרשת לומדת לשחזר נתונים רגילים, וכאשר מופיעה תופעה חריגה כמו עקה, תקלה בחיישן, מחלה נדירה או דפוס סביבתי יוצא דופן, השחזור נכשל בצורה יחסית גדולה. כך אפשר לזהות בעיות גם בלי להגדיר מראש כל קטגוריה. מודל כזה מתאים מאוד לניטור חממות, מערכות השקיה או שדות גדולים שבהם חשוב לזהות חריגות מוקדם.
כאשר המטרה היא קבלת החלטות דינמית, ניתן להשתמש ברשת נוירונים בתוך מסגרת של Reinforcement Learning. גם כאן הליבה היא רשת נוירונים. בינה מלאכותית בחקלאות משתמשת בגישה זו כדי ללמוד מדיניות פעולה אופטימלית, למשל כמה להשקות, מתי לדשן, או כיצד לנווט רובוט בין שורות גידול. הרשת מקבלת מצב נוכחי של הסביבה, ובוחרת פעולה. לפי תוצאה מצטברת, היא לומדת לשפר את ההחלטות. זהו שילוב חשוב במיוחד כאשר אין נוסחה קבועה לפתרון, אלא צריך ללמוד אסטרטגיה לאורך זמן.
 לסיכום, כאשר מתמקדים רק במודלים של רשתות נוירונים, ניתן לראות שבינה מלאכותית בחקלאות נשענת על כמה משפחות עיקריות: MLP עבור נתוני חיישנים מספריים, LSTM ו-GRU עבור חיזוי סדרות זמן, CNN ו-ResNet עבור זיהוי חזותי, EfficientNet עבור מערכות יעילות, YOLO עבור איתור עצמים, U-Net עבור סגמנטציה, Vision Transformer עבור הבנה גלובלית של תמונה, Autoencoder עבור גילוי חריגות, ורשתות ב-Reinforcement Learning עבור קבלת החלטות אוטונומית. כל רשת נוירונים משתלבת בפתרון אחר לפי סוג הבעיה, סוג הנתונים ורמת האוטומציה הנדרשת. כך בינה מלאכותית בחקלאות הופכת ממערכת ניטור בלבד למערכת חכמה שמבינה, חוזה, מזהה ופועל
לסיכום, כאשר מתמקדים רק במודלים של רשתות נוירונים, ניתן לראות שבינה מלאכותית בחקלאות נשענת על כמה משפחות עיקריות: MLP עבור נתוני חיישנים מספריים, LSTM ו-GRU עבור חיזוי סדרות זמן, CNN ו-ResNet עבור זיהוי חזותי, EfficientNet עבור מערכות יעילות, YOLO עבור איתור עצמים, U-Net עבור סגמנטציה, Vision Transformer עבור הבנה גלובלית של תמונה, Autoencoder עבור גילוי חריגות, ורשתות ב-Reinforcement Learning עבור קבלת החלטות אוטונומית. כל רשת נוירונים משתלבת בפתרון אחר לפי סוג הבעיה, סוג הנתונים ורמת האוטומציה הנדרשת. כך בינה מלאכותית בחקלאות הופכת ממערכת ניטור בלבד למערכת חכמה שמבינה, חוזה, מזהה ופועל
בינה מלאכותית בחקלאות: 10 נושאים מובילים עם דוגמאות מעשיות
| נושא | סוג רשת נוירונים | קלט | פלט | דוגמה מעשית |
|---|---|---|---|---|
| 1. חיזוי לחות קרקע | LSTM | היסטוריית לחות קרקע, טמפרטורה, קרינת שמש, זמני השקיה | תחזית לחות לשעות או ימים קדימה | מערכת בחממה מודדת לחות כל 10 דקות. מודל LSTM חוזה שבעוד 3 שעות הלחות תרד מתחת לסף, ולכן מפעיל השקיה מוקדמת ומונע עקת יובש. |
| 2. השקיה חכמה | MLP או LSTM | לחות קרקע, טמפרטורה, pH, שעה ביום, סוג גידול | כמות מים מומלצת | בחלקת עגבניות המערכת אינה מפעילה השקיה קבועה לכולם, אלא מחשבת לכל אזור כמה ליטר מים צריך לפי המצב האמיתי של הקרקע. |
| 3. חיזוי דישון | MLP | NPK, מוליכות, pH, לחות, טמפרטורה, קצב צמיחה | צורך בדישון או סוג מחסור | מערכת מקבלת נתוני קרקע ועל סמך הרשת מזהה שסביר שיש מחסור בחנקן, עוד לפני שהחקלאי מבחין בהצהבת העלים. |
| 4. זיהוי מחלות עלים | CNN / ResNet | תמונת עלה | סוג מחלה או עלה בריא/חולה | מצלמה מצלמת עלי מלפפון. ResNet מזהה קימחון בשלב מוקדם ומתריעה לבצע טיפול נקודתי רק באזור הנגוע. |
| 5. זיהוי מזיקים | YOLO | תמונת עלים, גבעולים או מלכודת חרקים | מיקום המזיק, סוג המזיק, ספירה | מצלמה בחממה סורקת מלכודת דביקה. YOLO מזהה כנימות לבנות, סופר אותן, ושולח התרעה כאשר הכמות עולה מעל סף מסוכן. |
| 6. סגמנטציה של אזורים נגועים | U-Net | תמונת עלה או פרי | מפה פיקסלית של אזור נגוע | בעלה פלפל יש כתמים. U-Net לא רק אומר שיש מחלה, אלא מסמן בדיוק איזה חלק מהעלה חולה, וכך ניתן למדוד את אחוז הנזק. |
| 7. גילוי חריגות בשדה או בחממה | Autoencoder | סדרות נתוני חיישנים או תמונות מצב תקין | ציון חריגה | מערכת לומדת מהו מצב תקין של חממה. כשיש פתאום שילוב חריג של חום גבוה, ירידת לחות ושינוי בדפוס הצמיחה, ה־Autoencoder מזהה חריגה גם בלי לדעת מראש את שם התקלה. |
| 8. חיזוי יבול | LSTM / MLP / CNN | היסטוריית צמיחה, תמונות שדה, נתוני אקלים, השקיה ודישון | תחזית כמות יבול | מטע תות שדה משתמש ב־LSTM כדי לחזות כמה קילוגרם פרי יהיו בשבוע הבא, וכך מתכנן עובדים, אריזה ושיווק מראש. |
| 9. מיון איכות פירות וירקות | CNN / Vision Transformer | תמונת פרי או ירק | דרגת איכות, בשלות, פגם | בקו מיון של עגבניות, מצלמה מצלמת כל פרי. CNN מסווג לעגבנייה תקינה, פגומה, בשלה מדי או לא בשלה, ומפנה אותה למסלול המתאים. |
| 10. רובוטיקה אוטונומית בחקלאות | YOLO + CNN + RL | תמונת שדה, מיקום שורות, מכשולים, מצב רובוט | החלטת תנועה, זיהוי מטרה, פעולה | רובוט שדה נוסע בין שורות חסה. YOLO מזהה עשבייה ומכשולים, ו־Reinforcement Learning מחליט איך להתקדם בלי לפגוע בצמחים ובלי לבזבז זמן. |
פירוט קצר לכל אחד
1. חיזוי לחות קרקע
רשת LSTM מתאימה כי לחות היא תהליך תלוי זמן.
דוגמה: אם היום חם מאוד והקרקע מתייבשת מהר, המודל לומד את הדפוס ומתריע לפני שהצמח נכנס לעקה.
2. השקיה חכמה
הרשת לא רק חוזה מצב, אלא מחליטה כמה להשקות.
דוגמה: שתי ערוגות באותה חממה מקבלות כמויות מים שונות, כי אחת מוצלת והשנייה חשופה יותר לשמש.
3. חיזוי דישון
MLP מקבל ערכי חיישנים ומחזיר הערכת מחסור תזונתי.
דוגמה: המערכת מזהה ירידה הדרגתית במדדים שמעידה על מחסור בדשן, וממליצה על תיקון לפני ירידה ביבול.
4. זיהוי מחלות
CNN ו־ResNet מצטיינות בזיהוי דפוסים חזותיים.
דוגמה: כתמים קטנים בעלה מזוהים כתחילת מחלה ולא כנזק אקראי מאבק או צל.
5. זיהוי מזיקים
YOLO טוב כשצריך גם לזהות וגם לאתר.
דוגמה: במקום רק לדעת שיש חרקים בתמונה, המודל מסמן בדיוק איפה כל חרק נמצא וכמה יש.
6. סגמנטציה
U-Net שימושי כשצריך גבול מדויק של האזור הפגוע.
דוגמה: אם 8% בלבד מהעלה חולה, ניתן להחליט שלא לעקור את הצמח אלא לטפל מקומית.
7. גילוי חריגות
Autoencoder מתאים למצבים שבהם קשה לאסוף דוגמאות לכל תקלה אפשרית.
דוגמה: תקלה בטפטפת, חיישן פגום או שינוי סביבתי קיצוני מזוהים כסטייה מהתנהגות רגילה.
8. חיזוי יבול
שילוב תמונות ונתוני זמן נותן תחזית טובה יותר.
דוגמה: המודל משתמש גם בגודל הפרי בתמונה וגם בקצב הצמיחה בשבועות האחרונים.
9. מיון איכות
CNN או Vision Transformer יכולים לזהות פגמים קטנים מאוד.
דוגמה: פרי עם סדק קטן או שינוי צבע קל מופרד אוטומטית לפני שיגיע לשיווק.
10. רובוטיקה אוטונומית
כאן משלבים כמה רשתות יחד.
דוגמה: רשת אחת מזהה פרי בשל, רשת שנייה מזהה מכשולים, ורשת RL מחליטה איך הרובוט ינוע ויפעל.
 דוגמה איך משלבים מערכת מלאה
דוגמה איך משלבים מערכת מלאה
בפתרון אמיתי של בינה מלאכותית בחקלאות אפשר לבנות שרשרת כזו:
חיישני לחות + טמפרטורה + pH אוספים נתונים
LSTM חוזה מצב לחות עתידי
MLP מחשב צורך בהשקיה ודישון
CNN מזהה מחלה בתמונת עלה
YOLO מזהה מזיקים או פרי בשל
U-Net מודד את היקף הנגע
RL מחליט האם להשקות, לרסס, להתריע או לשלוח רובוט
כך נוצרת מערכת בינה מלאכותית בחקלאות שהיא לא רק מערכת ניטור, אלא מערכת חכמה שמקבלת החלטות.
מחקרים מובילים – בינה מלאכותית בחקלאות
המחקרים האלו מייצגים את חמשת הכיוונים המרכזיים של בינה מלאכותית בחקלאות מבוססת NN:
-
CNN לזיהוי מחלות עלים
-
Deep Learning Survey למיפוי כל התחום
-
Faster R-CNN / Detection לזיהוי פירות ואובייקטים
-
DNN לחיזוי יבול
-
CNN-RNN / סדרות זמן לחיזוי חקלאי מתקדם